
Deepsea Challenger -Deepsea Challenger
 Kresba DCV1 na základě snímků z webu Deepsea Challenger (ne v měřítku)
|
|
| Dějiny | |
|---|---|
|
| |
| název | Deepsea Challenger |
| Stavitel | Acheron Project Pty Ltd |
| Spuštěno | 26. ledna 2012 |
| Ve službě | 2012 |
| Postavení | Aktivní od roku 2018 |
| Obecná charakteristika | |
| Typ | Hluboce ponořené vozidlo |
| Přemístění | 11,8 tuny |
| Délka | 7,3 m (24 stop) |
| Instalovaný výkon | elektrický motor |
| Pohon | 12 trysek |
| Rychlost | 3 uzly (5,6 km/h; 3,5 mph) |
| Vytrvalost | 56 hodin |
| Testovací hloubka | 11 000 m (36 000 stop) |
| Doplněk | 1 |
Deepsea Challenger (DCV 1) je 7,3 metru hluboké potápění navržené tak, aby dosáhlo na dno Challenger Deep , nejhlubšího bodu na Zemi. Dne 26. března 2012 kanadský filmový režisér James Cameron pilotoval plavidlo, aby dosáhl tohoto cíle ve druhém ponoru s posádkou dosahujícím Challenger Deep. Společnost Deepsea Challenger byla postavena v Sydney v Austrálii výzkumnou a projekční společností Acheron Project Pty Ltd azahrnuje vědecké vzorkovací zařízení a 3-D kamery s vysokým rozlišením; po dvou hodinách a 36 minutách sestupu z hladiny dosáhl nejhlubšího bodu oceánu.
Rozvoj
Deepsea Challenger byl postaven v Austrálii, ve spolupráci s National Geographic Society as podporou Rolex , v programu Deepsea Challenge. V čele stavby ponorky stál australský inženýr Ron Allum . Mnoho členů ponorného vývojářského týmu pochází z bratrstva jeskynního potápění v Sydney, včetně samotného Alluma s dlouholetou zkušeností s jeskynním potápěním.
Při práci v malé strojírenské dílně v Leichhardtu v Sydney Allum vytvořil nové materiály včetně specializované strukturní syntaktické pěny zvané Isofloat, která je schopna odolat obrovským tlakovým silám v hloubce 11 kilometrů. Nová pěna je jedinečná v tom, že je homogennější a má větší jednotnou pevnost než jiná komerčně dostupná syntaktická pěna, se specifickou hustotou asi 0,7 bude plavat ve vodě. Pěna se skládá z velmi malých dutých skleněných kuliček zavěšených v epoxidové pryskyřici a tvoří asi 70% objemu ponorky.
Síla pěny umožnila konstruktérům Deepsea Challenger začlenit motory trysek jako součást infrastruktury namontované v pěně, ale bez pomoci ocelového skeletu k montáži různých mechanismů. Pěna nahrazuje tanky naplněné benzínem pro flotaci, jak se používá v historickém batyskafu Terst .
Allum také vybudovalo mnoho inovací, nezbytných k překonání omezení stávajících produktů (a v současné době prochází vývojem pro další hlubinná vozidla). Patří sem tlakově vyvážené trysky naplněné olejem; LED osvětlovací pole; nové typy kamer; a rychlé, spolehlivé penetrační komunikační kabely umožňující přenosy skrz trup ponorky. Allum získal velkou část svých zkušeností s vývojem elektronické komunikace používané v Cameronových ponorech Titanicu při natáčení Ghosts of the Abyss , Bismarck a dalších.
Energetické systémy pro ponorku byly dodávány lithiovými bateriemi, které byly umístěny v pěně a lze je jasně vidět na propagačních fotografiích plavidla. Nabíjecí systémy lithiových baterií navrhl Ron Allum. Ponorné obsahuje více než 180 palubních systémů, včetně baterií, trysek, podpory života, 3D kamer a LED osvětlení. Tyto propojené systémy jsou monitorovány a řízeny programovatelným automatickým řadičem (PAC) od výrobce ovládacích prvků Opto 22 společnosti Temecula, Kalifornie . Během ponorů řídicí systém zaznamenával také hloubku, směr, teplotu, tlak, stav baterie a další data a odesílal jej na podpůrnou loď ve tříminutových intervalech prostřednictvím podvodního akustického komunikačního systému vyvinutého západoaustralskou společností L-3 Nautronix .
Klíčové konstrukční prvky, jako páteř a pilotní sféra, která nesla Camerona, byly navrženy tasmánskou společností Finite Elements. Design interiéru koule, včetně protipožární izolace, řízení kondenzace a montáže řídicích sestav, převzala poradenská společnost Design + Industry se sídlem v Sydney.

Specifikace
Ponorná je vybavena pilotní koulí o průměru 1,1 metru (43 palců), dostatečně velká pouze pro jednoho cestujícího. Koule s ocelovými stěnami o tloušťce 64 mm (2,5 palce ) byla testována na schopnost odolávat požadovaným 114 megapascalům (16 500 liber na čtvereční palec ) tlaku v tlakové komoře na Pennsylvania State University . Koule sedí na základně vozidla o hmotnosti 11,8 tuny (13,0 krátkých tun ). Vozidlo pracuje ve svislé poloze a nese 500 kg (1100 lb) zátěžové hmotnosti, která mu umožňuje jak klesnout na dno, tak po uvolnění stoupat na povrch. Pokud systém uvolnění závaží selže, když se plavidlo ocitne na mořském dně, je záložní galvanické uvolnění navrženo tak, aby korodovalo ve slané vodě v nastaveném časovém období, což umožňuje, aby se ponorka automaticky vynořila. Deepsea Challenger má méně než desetinu hmotnosti svého předchůdce před padesáti lety, batyskafu Terst ; moderní vozidlo také nese dramaticky více vědeckého vybavení než Terst a je schopné rychlejšího stoupání a klesání.

Majáky a antény, nahoře
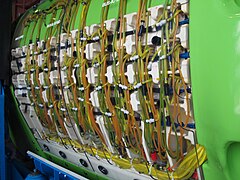
Pole baterií.

Jeden z trysek.

Jedna ze dvou hlavních závaží.

Pilotní sféra před instalací.

Poklop a výřez.

Pilotní sféra, interiér.







Ponory
Rané ponory
Na konci ledna 2012, aby Cameron otestoval systémy, strávil tři hodiny v ponoru, zatímco byl ponořen těsně pod povrchem v australském námořním dvoře v Sydney. Dne 21. února 2012 byl zkušební ponor, jehož cílem bylo dosáhnout hloubky více než 1 000 m (3 300 stop), po hodině přerušen kvůli problémům s kamerami a systémy podpory života . Dne 23. února 2012, nedaleko ostrova New Britain , Cameron úspěšně vzal ponorku na dno oceánu ve výšce 991 m (3251 ft), kde se setkal se žlutým dálkově ovládaným vozidlem ovládaným z lodi výše. Dne 28. února 2012, během sedmihodinového ponoru, Cameron strávil šest hodin v ponoru v hloubce 3700 m (12100 stop). Kolísání napájecího systému a nepředvídané proudy představovaly neočekávané výzvy.
Dne 4. března 2012 se rekordní ponor na více než 7 260 m (23 820 stop) zastavil u dna New Britain Trench, když problémy s vertikálními tryskami vedly Camerona k návratu na povrch. O několik dní později, když byl technický problém vyřešen, Cameron úspěšně vzal ponor na dno New Britain Trench a dosáhl maximální hloubky 8 221 m (26 972 ft). Tam našel širokou pláň volného sedimentu , sasanky , medúzy a různá stanoviště, kde se planina stýkala se stěnami kaňonu.
Challenger Deep
Dne 18. března 2012, po opuštění testovací oblasti v relativně klidném Šalamounově moři , bylo ponorné plavidlo na palubě povrchové lodi Mermaid Sapphire , zakotvené v přístavu Apra , Guam, procházelo opravami a modernizacemi a čekalo na dostatečně klidný oceán, který by provedl potápět se. Do 24. března 2012, poté, co opustil přístav v Guamu dny dříve, bylo ponorné na palubě jednoho ze dvou povrchových plavidel, která opustila atol Ulithi pro Challenger Deep.
Dne 26. března 2012 bylo oznámeno, že dosáhla dna Mariánského příkopu .


Sestup, od začátku ponoru po příjezd na mořské dno, trval dvě hodiny a 37 minut, téměř dvakrát rychleji než sestup z Terstu. Hodinky Rolex, „nošené“ na robotické paži ponorky, nadále během ponoru fungovaly normálně. Ne všechny systémy při ponoru fungovaly tak, jak bylo plánováno: přistávací moduly s návnadou nespadly před ponorem, protože nefungoval sonar, který je potřeboval najít na dně oceánu, a problémy s používáním vzorkovacích zařízení ztěžovaly problémy s hydraulickým systémem. Přesto, zhruba po třech hodinách na mořském dně a úspěšném výstupu, bylo další zkoumání Challenger Deep s unikátním ponorem naplánováno později na jaře 2012.
Evidence
Dne 26. března 2012, Cameron dosáhl dna Challenger Deep, nejhlubší části Mariánského příkopu . Maximální hloubka zaznamenaná během tohoto rekordního ponoru byla 10 908 metrů (35 787 stop). Měřeno Cameronem, v okamžiku přistání byla hloubka 10 898 m (35 756 ft). Jednalo se o čtvrtý vůbec potápět na Challenger Deep a druhá s posádkou ponor (s maximální hloubkou zaznamenán mírně méně než to Trieste je 1960 dive). Jednalo se o první sólový ponor a první, který strávil značné množství času (tři hodiny) průzkumem dna.
Následné události
Společnost Deepsea Challenger byla darována oceánografické instituci Woods Hole za studie jejích technologických řešení za účelem začlenění některých z těchto řešení do jiných vozidel za účelem posílení hlubinného výzkumu. Dne 23. července 2015 byl převezen z oceánografické instituce Woods Hole do Baltimoru, aby byl odeslán do Austrálie na dočasnou půjčku. Na valníku na dálnici Interstate 95 v Connecticutu kamion začal hořet, což mělo za následek poškození ponorného motoru. Pravděpodobnou příčinou požáru bylo selhání brzdy nákladního vozidla, které zapálilo jeho zadní pneumatiky. Zástupci hasičů z Connecticutu spekulovali, že to byla úplná ztráta pro Deepsea Challenger ; skutečný rozsah poškození však nebyl hlášen. Po požáru bylo ponorné plavidlo přepraveno zpět do oceánografického ústavu Woods Hole. V únoru 2016 byl přesunut do Kalifornie kvůli opravám.
Podobné úsilí
V únoru 2012 se vyvíjí několik dalších vozidel, aby dosáhly stejných hloubek. Mezi skupiny, které je vyvíjejí, patří:
- Triton Submarines , společnost se sídlem na Floridě, která navrhuje a vyrábí soukromé ponorky, jejichž vozidlo, Triton 36000/3 , vezme tříčlennou posádku na mořské dno za 120 minut.
- Virgin Oceanic , podporovaný Richard Branson je Virgin Group , vyvíjí ponorku navrženou Graham Hawkes , DeepFlight Challenger , se kterými bude solo pilot trvat 140 minut dostat se na mořské dno.
- DOER Marine , je San Francisco Bay Area založeno námořní technologická společnost založená v roce 1992, která vyvíjí vozidlo Deepsearch (a Ocean Explorer HOV Unlimited ), s nějakou podporou Google ‚s Ericem Schmidtem , se kterým posádka dvou nebo tří vezme 90 minut k dosažení mořského dna, jako program Hluboké hledání .
Viz také
- Expedice Challenger - expedice oceánografického výzkumu (1872–1876)
- Hlubinný průzkum -zkoumání fyzikálních, chemických a biologických podmínek na mořském dně
- Časová osa potápěčské technologie - Chronologický seznam významných událostí v historii potápěčského vybavení
Reference
externí odkazy
-
 Média související s Deepsea Challenger na Wikimedia Commons
Média související s Deepsea Challenger na Wikimedia Commons -
Oficiální webové stránky

- Článek o využití výpočetní dynamiky tekutin během procesu návrhu Deepsea Challenger
- Video NGS: Cameronův návrat z Challenger Deep
- Deepsea Challenge 3D na IMDb ,dokumentární film National Geographic Channel z roku 2014.