Fyzikální princip, který říká, že síla (F) potřebná k prodloužení nebo stlačení pružiny o určitou vzdálenost X se lineárně mění s ohledem na tuto vzdálenost
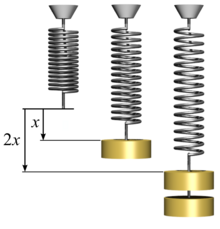
Hookeův zákon: síla je úměrná prodloužení

Bourdonovy trubice jsou založeny na Hookeově zákonu. Síla vytvořená
tlakem plynu uvnitř svinuté kovové trubice nahoře ji odvíjí o množství úměrné tlaku.
Bilance kolo v jádru mnoha mechanických hodinek záleží na Hooke práva. Protože točivý moment generovaný vinutou pružinou je úměrný úhlu otočenému kolem, mají jeho kmity téměř konstantní periodu.
Hookeův zákon je fyzikální zákon, který uvádí, že síla ( F ) potřebná k prodloužení nebo stlačení pružiny o určitou vzdálenost ( x ) se lineárně mění vzhledem k této vzdálenosti - tj. F s = kx , kde k je konstantní faktor charakteristika pružiny (tj. její tuhost ), a x je malá ve srovnání s celkovou možnou deformací pružiny. Zákon je pojmenován po britském fyzikovi 17. století Robertu Hookovi . Poprvé uvedl zákon v roce 1676 jako latinský anagram . Roku 1678 publikoval řešení svého přesmyčku jako: ut tensio, sic vis („jako prodloužení, takže síla“ nebo „prodloužení je úměrné síle“). Hooke v díle z roku 1678 uvádí, že si byl vědom zákona od roku 1660.
Hookeova rovnice platí (do určité míry) v mnoha dalších situacích, kdy je deformováno pružné tělo, jako je vítr foukající na vysokou budovu a hudebník trhající strunu kytary. Pružné těleso nebo materiál, u kterého lze tuto rovnici předpokládat, je prý lineárně elastické nebo Hookean .
Hookeův zákon je pouze lineární aproximací prvního řádu ke skutečné reakci pružin a jiných elastických těles na působící síly. Jakmile síly překročí určitou mez, musí nakonec selhat, protože žádný materiál nelze stlačit za určitou minimální velikost nebo natáhnout za maximální velikost bez trvalé deformace nebo změny stavu. Mnoho materiálů se znatelně odchýlí od Hookeova zákona ještě před dosažením těchto elastických limitů .
Na druhou stranu je Hookeův zákon přesnou aproximací většiny pevných těles, pokud jsou síly a deformace dostatečně malé. Z tohoto důvodu je Hookeův zákon široce používán ve všech oborech vědy a techniky a je základem mnoha oborů, jako je seismologie , molekulární mechanika a akustika . Je také základním principem jarní měřítku , je manometr , na galvanometer , a setrvačníku z mechanických hodin .
Moderní teorie pružnosti zobecňuje Hookeův zákon, aby řekl, že napětí (deformace) elastického předmětu nebo materiálu je úměrné napětí, které na něj působí. Protože však obecná napětí a deformace mohou mít více nezávislých složek, „faktor proporcionality“ již nemusí být jen jedno skutečné číslo, ale spíše lineární mapa ( tenzor ), kterou lze reprezentovat maticí skutečných čísel.
V této obecné podobě Hookeův zákon umožňuje odvodit vztah mezi napětím a napětím u složitých objektů z hlediska vnitřních vlastností materiálů, ze kterých je vyroben. Lze například odvodit, že homogenní tyč s rovnoměrným průřezem se bude při natažení chovat jako jednoduchá pružina, s tuhostí k přímo úměrnou její ploše průřezu a nepřímo úměrnou její délce.
Formální definice
Pro lineární pružiny
Uvažujme jednoduchou šroubovicovou pružinu, která má jeden konec připevněný k nějakému pevnému předmětu, zatímco volný konec je tažen silou, jejíž velikost je F s . Předpokládejme, že pružina dosáhla stavu rovnováhy , kde se její délka již nemění. Nechť x je množství, o které byl volný konec pružiny přemístěn z její „uvolněné“ polohy (když není natahována). Hookův zákon to říká

nebo ekvivalentně

kde k je kladné reálné číslo, charakteristické pro jaro. Kromě toho platí stejný vzorec, když je pružina stlačena, přičemž F s a x jsou v takovém případě záporné. Podle tohoto vzorce bude graf aplikované síly F s jako funkce posunutí x přímka procházející počátkem , jejíž sklon je k .
Hookeův zákon pro pružinu je někdy, ale zřídka, podle konvence stanoven, že F s je obnovující síla vyvíjená pružinou na cokoli, co táhne její volný konec. V takovém případě se rovnice stane

protože směr vratné síly je opačný ke směru posunutí.
Obecné „skalární“ prameny
Hookeův pružinový zákon se obvykle vztahuje na jakýkoli elastický předmět libovolné složitosti, pokud lze deformaci i napětí vyjádřit jediným číslem, které může být kladné i záporné.
Například když je blok gumy připevněný ke dvěma rovnoběžným deskám deformován střihem , místo natahování nebo stlačování, posouvající síla F s a boční posun desek x se řídí Hookeovým zákonem (pro dostatečně malé deformace).
Hookeův zákon platí také tehdy, když je přímá ocelová tyč nebo betonový nosník (jako ten, který se používá v budovách), podepřený na obou koncích, ohnutý závažím F umístěným v nějakém mezilehlém bodě. Posun x je v tomto případě odchylka paprsku, měřená v příčném směru, vzhledem k jeho nezatíženému tvaru.
Zákon také platí, když se natažený ocelový drát zkroutí zatažením za páku připevněnou na jednom konci. V tomto případě lze napětí F s brát jako sílu působící na páku a x jako vzdálenost, kterou urazila po své kruhové dráze. Nebo ekvivalentně, je možné nechat F y je kroutící moment aplikován na páky na konci drátu, a x je úhel, o který že koncových závitů. V každém případě je F s úměrné x (i když konstanta k je v každém případě odlišná.)
Vektorové formulace
V případě šroubovicové pružiny, která je natažena nebo stlačena podél své osy , má aplikovaná (nebo obnovující) síla a výsledné prodloužení nebo stlačení stejný směr (což je směr uvedené osy). Pokud jsou tedy F s a x definovány jako vektory , Hookeova rovnice stále platí a říká, že vektor síly je vektor prodloužení vynásobený pevným skalárem .
Obecná tenzorová forma
Některá elastická tělesa se při působení síly v jiném směru deformují v jednom směru. Jedním příkladem je horizontální dřevěný paprsek s čtvercovým obdélníkovým průřezem, který je ohnut příčným zatížením, které není ani svislé, ani vodorovné. V takových případech bude velikost posunu x úměrná velikosti síly F s , pokud její směr zůstane stejný (a její hodnota není příliš velká); takže skalární verze Hookeova zákona F s = −kx bude platit. Vektory síly a posunutí však nebudou navzájem skalární násobky, protože mají různé směry. Navíc poměr k mezi jejich velikostmi bude záviset na směru vektoru F s .
Přesto v takových případech často existuje pevný lineární vztah mezi silovými a deformačními vektory, pokud jsou dostatečně malé. Jmenovitě existuje funkce κ od vektorů k vektorům, takže F = κ ( X ) a κ ( α X 1 + β X 2 ) = α κ ( X 1 ) + β κ ( X 2 ) pro jakákoli reálná čísla α , β a jakékoli posunovací vektory X 1 , X 2 . Taková funkce se nazývá tenzor (druhého řádu) .
S ohledem na libovolný kartézský souřadnicový systém mohou být silové a výtlakové vektory reprezentovány maticemi 3 × 1 skutečných čísel. Pak tenzor κ, který je spojuje, může být reprezentován maticí 3 × 3 κ skutečných koeficientů, která po vynásobení vektorem posunutí dává vektor síly:

To znamená,

pro i = 1, 2, 3 . Dá se tedy říci , že Hookeův zákon F = κX platí také tehdy, když X a F jsou vektory s proměnnými směry, kromě toho, že tuhost objektu je tenzor κ , nikoli jediné skutečné číslo k .
Hookeův zákon pro kontinuální média

(a) Schéma polymerního nanopružiny. Poloměr cívky, R, stoupání, P, délka pružiny, L a počet závitů, N, jsou 2,5 μm, 2,0 μm, 13 μm, respektive 4. Elektronové mikrografy nanopružiny před vložením (be), natažením (f), stlačením (g), ohnutím (h) a obnovením (i). Všechny stupnice jsou 2 μm. Pružina následovala lineární reakci proti aplikované síle, což demonstrovalo platnost Hookeova zákona v nanoměřítku.
Napětí a deformace materiálu uvnitř souvislého elastického materiálu (jako je gumový blok, stěna kotle nebo ocelová tyč) jsou spojeny lineárním vztahem, který je matematicky podobný Hookovu pružinovému zákonu a je často označován pod tím jménem.
Kmenový stav v pevném médiu kolem určitého bodu však nelze popsat jediným vektorem. Stejný balík materiálu, bez ohledu na to, jak malý, lze současně stlačovat, natahovat a stříhat v různých směrech. Stejně tak napětí v tomto balíku může být současně tlačení, tahání a stříhání.
Aby byla tato složitost zachycena, musí být příslušný stav média kolem bodu reprezentován tenzory dvou řádů druhého, tenzorem tahu ε (namísto posunutí X ) a tenzorem napětí σ (nahrazující obnovovací sílu F ). Analogem Hookeova jarního zákona pro spojitá média je pak

kde c je tenzor čtvrtého řádu (tj. lineární mapa mezi tenzory druhého řádu), obvykle nazývaný tenzor tuhosti nebo tenzor pružnosti . Jeden může také napsat jako

kde tenzor s , nazývaný tenzor shody , představuje převrácenou hodnotu uvedené lineární mapy.
V kartézském souřadném systému mohou být tenzory napětí a deformace reprezentovány maticemi 3 × 3

Jako lineární zobrazení mezi devíti čísly σ ij a devíti čísly ε kl je tenzor c tuhosti c reprezentován maticí 3 × 3 × 3 × 3 = 81 reálných čísel c ijkl . Hookův zákon to pak říká

kde i , j = 1,2,3 .
Všechny tři tenzory se obecně liší od bodu k bodu uvnitř média a mohou se také měnit s časem. Tenzor tenzoru ε pouze určuje posun částic média v sousedství bodu, zatímco tenzor napětí σ určuje síly, které na sebe působí sousední balíky média. Proto jsou nezávislé na složení a fyzickém stavu materiálu. Tenzor c tuhosti c je na druhé straně vlastností materiálu a často závisí na fyzikálních stavových proměnných, jako je teplota, tlak a mikrostruktura .
Vzhledem k inherentní symetrii σ , ε a c je pouze 21 jejich elastických koeficientů nezávislých. Toto číslo lze dále snížit symetrií materiálu: 9 pro ortorombický krystal, 5 pro hexagonální strukturu a 3 pro kubickou symetrii. U izotropních médií (která mají stejné fyzikální vlastnosti v libovolném směru) lze c redukovat pouze na dvě nezávislá čísla, objemový modul K a smykový modul G , které kvantifikují odolnost materiálu vůči změnám objemu a smykovým deformacím, resp. .
Analogické zákony
Vzhledem k tomu, Hookův zákon je jednoduchá úměrnost mezi dvěma množstvích, jeho vzorce a důsledky jsou matematicky podobné těm z mnoha dalších fyzikálních zákonů, jako jsou ty, které popisují pohyb tekutin , nebo polarizace z A dielektrika pomocí elektrického pole .
Zejména tenzorová rovnice σ = cε týkající se elastických napětí ke kmenům je zcela podobná rovnici τ = με̇ vztahující se k tenzoru viskózního napětí τ a tenzoru rychlosti deformace ε̇ v proudech viskózních tekutin; ačkoli první se týká statických napětí (vztahujících se k velikosti deformace), zatímco druhá se týká dynamických napětí (související s rychlostí deformace).
Jednotky měření
V jednotkách SI se posunutí měří v metrech (m) a síly v newtonech (N nebo kg · m/s 2 ). Proto je pružinová konstanta k a každý prvek tenzoru κ měřena v newtonech na metr (N/m) nebo v kilogramech za sekundu na druhou (kg/s 2 ).
U spojitých médií je každý prvek tenzoru napětí σ silou dělenou plochou; proto se měří v jednotkách tlaku, konkrétně v pascalech (Pa nebo N/m 2 nebo kg/(m · s 2 ). Prvky tenzoru napětí ε jsou bezrozměrné (posuny děleno vzdálenostmi). o c ijkl jsou vyjádřeny v jednotkách tlaku.
Obecná aplikace na elastické materiály

Křivka napětí-deformace pro nízkouhlíkové oceli, znázorňující vztah mezi
stresem (síla na jednotku plochy) a
kmen (výsledná komprese / natažení, známý jako deformace). Hookeův zákon platí pouze pro tu část křivky mezi počátkem a mezí kluzu (2).
Objekty, které po deformaci silou rychle získají svůj původní tvar a molekuly nebo atomy jejich materiálu se vrátí do počátečního stavu stabilní rovnováhy, často dodržují Hookeův zákon.
Hookeův zákon platí pouze pro některé materiály za určitých podmínek nakládky. Ocel vykazuje lineárně elastické chování ve většině technických aplikací; Hookeův zákon pro něj platí v celém jeho elastickém rozsahu (tj. Pro napětí pod mezí kluzu ). U některých jiných materiálů, jako je hliník, platí Hookeův zákon pouze pro část elastického rozsahu. Pro tyto materiály je definováno proporcionální mezní napětí, pod kterým jsou chyby související s lineární aproximací zanedbatelné.
Kaučuk je obecně považován za „neháčkovský“ materiál, protože jeho pružnost je závislá na napětí a je citlivá na teplotu a rychlost zatížení.
Zobecnění Hookeova zákona pro případ velkých deformací poskytují modely neo-Hookeanových těles a těles Mooney – Rivlin .
Odvozené vzorce
Tvarové napětí rovnoměrné tyče
Na tyč z jakéhokoli elastického materiálu lze pohlížet jako na lineární pružinu . Tyč má délku L a průřezová oblast A . Jeho pevnost v tahu σ je přímo úměrná jeho frakční rozšíření nebo kmene e od modulu pružnosti E :
-
 .
.
Modul pružnosti lze často považovat za konstantní. Na druhé straně,

(tj. zlomková změna délky) a od

z toho vyplývá, že:

Změna délky může být vyjádřena jako

Jarní energie
Potenciální energie U el ( x ) uložená v pružině je dána vztahem

které pochází ze sčítání energie potřebné k postupnému stlačování pružiny. Tedy integrál síly nad výtlakem. Protože vnější síla má stejný obecný směr jako posun, je potenciální energie pružiny vždy nezáporná.
Tento potenciální U el lze zobrazit jako parabola na Ux -rovině tak, že U el ( x ) =
1/2kx 2 . Jak je pružina natažena v kladnémsměru x , potenciální energie se zvyšuje parabolicky (totéž se děje, když je pružina stlačena). Protože se změna potenciální energie mění konstantní rychlostí:

Všimněte si, že změna změny U je konstantní, i když jsou posunutí a zrychlení nulové.
Uvolněné silové konstanty (generalizované konstanty souladu)
Uvolněné silové konstanty (inverze generalizovaných konstant kompatibility) jsou pro molekulární systémy jednoznačně definovány v rozporu s obvyklými „rigidními“ silovými konstantami, a proto jejich použití umožňuje provádět smysluplné korelace mezi silovými poli vypočítanými pro reaktanty , přechodové stavy a produkty chemické reakce . Stejně jako lze potenciální energii zapsat jako kvadratickou formu do vnitřních souřadnic, lze ji také zapsat z hlediska generalizovaných sil. Výsledné koeficienty se nazývají konstanty souladu . Existuje přímá metoda pro výpočet konstanty souladu pro jakoukoli vnitřní souřadnici molekuly, aniž by bylo nutné provádět analýzu v normálním režimu. Vhodnost uvolněných silových konstant (konstant inverzní kompliance) jako deskriptorů síly kovalentní vazby byla prokázána již v roce 1980. Nedávno byla prokázána také vhodnost jako deskriptory síly nekovalentních vazeb.
Harmonický oscilátor
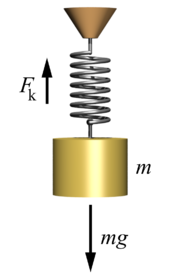
Hmota zavěšená pružinou je klasickým příkladem harmonického oscilátoru
Hmotnost m připojená ke konci pružiny je klasickým příkladem harmonického oscilátoru . Mírným zatažením za hmotu a následným uvolněním se systém nastaví na sinusový oscilační pohyb kolem rovnovážné polohy. Do té míry, že pružina dodržuje Hookeův zákon a že lze zanedbávat tření a hmotnost pružiny, zůstane amplituda kmitání konstantní; a jeho frekvence f bude nezávislá na jeho amplitudě, určené pouze hmotností a tuhostí pružiny:

Tento jev umožnil konstrukci přesných mechanických hodin a hodinek, které bylo možné nosit na lodích a v kapsách lidí.
Rotace v prostoru bez gravitace
Pokud by byla hmotnost m připevněna k pružině se silovou konstantou k a otáčející se ve volném prostoru, napětí pružiny ( F t ) by dodalo potřebnou dostředivou sílu ( F c ):

Protože F t = F c a x = r , pak:

Vzhledem k tomu, že ω = 2π f , vede to ke stejné frekvenční rovnici jako výše:
Teorie lineární elasticity pro spojitá média
- Poznámka: níže je použita Einsteinova sumační konvence sčítání na opakovaných indexech.
Izotropní materiály
Analogický vývoj pro viskózní kapaliny najdete v tématu
Viskozita .
Izotropní materiály se vyznačují vlastnostmi, které jsou nezávislé na směru v prostoru. Fyzikální rovnice zahrnující izotropní materiály proto musí být nezávislé na souřadnicovém systému zvoleném pro jejich reprezentaci. Tenzor napětí je symetrický tenzor. Protože stopa jakéhokoli tenzoru je nezávislá na jakémkoli souřadném systému, nejkompletnějším rozkladem symetrických tenzorů bez souřadnic je reprezentovat jej jako součet konstantního tenzoru a beze stopového symetrického tenzoru. V indexové notaci tedy :

kde δ ij je Kroneckerova delta . V přímém zápisu tenzoru:

kde já jsem tenzor identity druhého řádu.
První výraz vpravo je tenzor konstantního napětí, známý také jako tenzor tenzometrického napětí , a druhý termín je bezeztrátový symetrický tenzor, známý také jako tenzor deviatorického napětí nebo tenzor tenzoru .
Nejobecnější formu Hookeova zákona pro izotropní materiály lze nyní zapsat jako lineární kombinaci těchto dvou tenzorů:

kde K je modul objemu a G je modul smyku .
Pomocí vztahů mezi elastickými moduly mohou být tyto rovnice vyjádřeny také různými jinými způsoby. Běžná forma Hookeova zákona pro izotropní materiály, vyjádřená přímou tenzorovou notací, je

kde λ = K -2/3G = c 1.111 - 2 c 1212 a μ = G = c 1212 jsou lame konstanty , I je druhořadou identita tensor, a I je symetrická část identity tenzoru čtvrté pozici. V indexové notaci:

Inverzní vztah je

Tenzor poddajnosti ve vztahu ε = s : σ tedy je

Pokud jde o Youngův modul a Poissonův poměr , Hookeův zákon pro izotropní materiály lze pak vyjádřit jako

Toto je forma, ve které je napětí vyjádřeno pomocí tenzoru napětí ve strojírenství. Výraz v rozšířené podobě je

kde E je Youngův modul a ν je Poissonův poměr . (Viz 3-D elasticita ).
| Odvození Hookeova zákona ve třech dimenzích
|
| Trojrozměrnou formu Hookeova zákona lze odvodit pomocí Poissonova poměru a jednorozměrné formy Hookeova zákona následujícím způsobem.
Zvažte vztah napětí a napětí jako superpozici dvou účinků: roztahování ve směru zatížení (1) a smršťování (způsobené zatížením) v kolmých směrech (2 a 3),

kde ν je Poissonův poměr a E je Youngův modul.
Získáme podobné rovnice pro zatížení ve směrech 2 a 3,

a

Sečtením tří případů dohromady ( ε i = ε i ′ + ε i ″ + ε i ‴ ) dostaneme

nebo přidáním a odečtením jednoho νσ

a dále se dostaneme řešením σ 1

Výpočet součtu

a dosazením do rovnice vyřešené pro σ 1 vyjde

kde μ a λ jsou parametry Lamé .
Podobné zacházení se směry 2 a 3 dává Hookův zákon ve třech rozměrech.
|
V maticové formě lze Hookeův zákon pro izotropní materiály psát jako

kde γ ij = 2 ε ij je technické smykové napětí . Inverzní vztah lze zapsat jako

což lze zjednodušit díky Lamé konstantám:

Ve vektorovém zápisu se to stává

kde já jsem tenzor identity.
Rovinný stres
Za podmínek rovinného napětí platí σ 31 = σ 13 = σ 32 = σ 23 = σ 33 = 0 . V takovém případě má formu Hookeův zákon

Ve vektorovém zápisu se to stává

Inverzní vztah je obvykle psán v redukované formě

Kmen letadla
Za podmínek rovinné deformace ε 31 = ε 13 = ε 32 = ε 23 = ε 33 = 0 . V tomto případě má formu Hookeův zákon

Anizotropní materiály
Ze symetrie Cauchyho tenzoru napětí ( σ ij = σ ji ) a zobecněných Hookových zákonů ( σ ij = c ijkl ε kl ) vyplývá, že c ijkl = c jikl . Podobně symetrie nekonečně malého tenzoru napětí znamená, že c ijkl = c ijlk . Tyto symetrie se nazývají vedlejší symetrie tenzoru c tuhosti . Tím se sníží počet elastických konstant z 81 na 36.
Pokud navíc, protože posunutí posunu a Cauchyho napětí jsou pracovní konjugát, vztah napětí -napětí lze odvodit z funkční hustoty deformační energie ( U ), pak

Z libovolnosti pořadí diferenciace vyplývá, že c ijkl = c klij . Nazývají se hlavní symetrie tenzoru tuhosti. Tím se sníží počet elastických konstant z 36 na 21. Hlavní a vedlejší symetrie naznačují, že tenzor tuhosti má pouze 21 nezávislých komponent.
Maticová reprezentace (tenzor tuhosti)
Často je užitečné vyjádřit anizotropní formu Hookeova zákona maticovou notací, nazývanou také Voigtova notace . K tomu využijeme symetrie tenzorů napětí a napětí a vyjádříme je jako šestidimenzionální vektory v ortonormálním souřadnicovém systému ( e 1 , e 2 , e 3 ) jako
![{\ Displaystyle [{\ boldsymbol {\ sigma}}] \, = \, {\ begin {bmatrix} \ sigma _ {11} \\\ sigma _ {22} \\\ sigma _ {33} \\\ sigma _ {23} \\\ sigma _ {13} \\\ sigma _ {12} \ end {bmatrix}} \, \ equiv \, {\ begin {bmatrix} \ sigma _ {1} \\\ sigma _ { 2} \\\ sigma _ {3} \\\ sigma _ {4} \\\ sigma _ {5} \\\ sigma _ {6} \ end {bmatrix}} \,; \ qquad [{\ boldsymbol { \ varepsilon}}] \, = \, {\ begin {bmatrix} \ varepsilon _ {11} \\\ varepsilon _ {22} \\\ varepsilon _ {33} \\ 2 \ varepsilon _ {23} \\ 2 \ varepsilon _ {13} \\ 2 \ varepsilon _ {12} \ end {bmatrix}} \, \ equiv \, {\ begin {bmatrix} \ varepsilon _ {1} \\\ varepsilon _ {2} \\\ varepsilon _ {3} \\\ varepsilon _ {4} \\\ varepsilon _ {5} \\\ varepsilon _ {6} \ end {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/99d84c34fc9efc62922b42a33f888656c62d794b)
Potom lze tenzor tuhosti ( c ) vyjádřit jako
![{\ displaystyle [{\ mathsf {c}}] \, = \, {\ begin {bmatrix} c_ {1111} & c_ {1122} & c_ {1133} & c_ {1123} & c_ {1131} & c_ {1112} \\ c_ {2211} & c_ {2222} & c_ {2233} & c_ {2223} & c_ {2231} & c_ {2212} \\ c_ {3311} & c_ {3322} & c_ {3333} & c_ {3323} & c_ {3331} & c_ {3312} \ \ c_ {2311} & c_ {2322} & c_ {2333} & c_ {2323} & c_ {2331} & c_ {2312} \\ c_ {3111} & c_ {3122} & c_ {3133} & c_ {3123} & c_ {3131} & c_ {3112 } \\ c_ {1211} & c_ {1222} & c_ {1233} & c_ {1223} & c_ {1231} & c_ {1212} \ end {bmatrix}} \, \ equiv \, {\ begin {bmatrix} C_ {11} & C_ {12} & C_ {13} & C_ {14} & C_ {15} & C_ {16} \\ C_ {12} & C_ {22} & C_ {23} & C_ {24} & C_ {25} & C_ {26} \\ C_ {13 } & C_ {23} & C_ {33} & C_ {34} & C_ {35} & C_ {36} \\ C_ {14} & C_ {24} & C_ {34} & C_ {44} & C_ {45} & C_ {46} \\ C_ {15} & C_ {25} & C_ {35} & C_ {45} & C_ {55} & C_ {56} \\ C_ {16} & C_ {26} & C_ {36} & C_ {46} & C_ {56} & C_ {66} \ end {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85c8bf05adff9dcaec56f4863dd039fae5986a79)
a Hookův zákon je napsán jako
![{\ Displaystyle [{\ boldsymbol {\ sigma}}] = [{\ mathsf {C}}] [{\ boldsymbol {\ varepsilon}}]] \ qquad {\ text {or}} \ qquad \ sigma _ {i} = C_ {ij} \ varepsilon _ {j} \ ,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f0315b5cfc25f83e499fadf8ce4921e11340f8e)
Podobně tenzor ( y ) souladu lze zapsat jako
![{\ displaystyle [{\ mathsf {s}}] \, = \, {\ begin {bmatrix} s_ {1111} & s_ {1122} & s_ {1133} & 2s_ {1123} & 2s_ {1131} & 2s_ {1112} \\ s_ {2211} & s_ {2222} & s_ {2233} & 2s_ {2223} & 2s_ {2231} & 2s_ {2212} \\ s_ {3311} & s_ {3322} & s_ {3333} & 2s_ {3323} & 2s_ {3331} & 2s_ {3312} \ \ 2s_ {2311} & 2s_ {2322} & 2s_ {2333} & 4s_ {2323} & 4s_ {2331} & 4s_ {2312} \\ 2s_ {3111} & 2s_ {3122} & 2s_ {3133} & 4s_ {3123} & 4s_ {3131} & 4s_ {3112 } \\ 2s_ {1211} & 2s_ {1222} & 2s_ {1233} & 4s_ {1223} & 4s_ {1231} & 4s_ {1212} \ end {bmatrix}} \, \ equiv \, {\ begin {bmatrix} S_ {11} & S_ {12} & S_ {13} & S_ {14} & S_ {15} & S_ {16} \\ S_ {12} & S_ {22} & S_ {23} & S_ {24} & S_ {25} & S_ {26} \\ S_ {13 } & S_ {23} & S_ {33} & S_ {34} & S_ {35} & S_ {36} \\ S_ {14} & S_ {24} & S_ {34} & S_ {44} & S_ {45} & S_ {46} \\ S_ {15} & S_ {25} & S_ {35} & S_ {45} & S_ {55} & S_ {56} \\ S_ {16} & S_ {26} & S_ {36} & S_ {46} & S_ {56} & S_ {66} \ end {bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34760b2d8ef86f720051aebe5a45a65b312bcab6)
Změna souřadného systému
Pokud se lineární elastický materiál otáčí z referenční konfigurace do jiné, pak je materiál symetrický vzhledem k rotaci, pokud součásti tenzoru tuhosti v otočené konfiguraci souvisejí se součástmi v referenční konfiguraci vztahem

kde l ab jsou složky ortogonální rotační matice [ L ] . Stejný vztah platí také pro inverze.
V maticovém zápisu, pokud transformovaný základ (otočený nebo převrácený) souvisí s referenčním základem o
![{\ Displaystyle [\ mathbf {e} _ {i} '] = [L] [\ mathbf {e} _ {i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/213d0bb55cc1da894c855871790e09d78635c17b)
pak

Navíc, pokud je materiál symetrický vzhledem k transformaci [ L ], pak

Ortotropní materiály
Ortotropní materiály mají tři ortogonální roviny symetrie . Pokud jsou základní vektory ( e 1 , e 2 , e 3 ) normály k rovinám symetrie, pak vztahy transformace souřadnic naznačují, že

Inverzní hodnota tohoto vztahu se běžně zapisuje jako

kde
-
E i je Youngův modul podél osy i
-
G ij je modul smyku ve směru j v rovině, jejíž normála je ve směru i
-
ν ij je Poissonův poměr, který odpovídá kontrakci ve směru j, když je ve směru i aplikováno prodloužení .
Za podmínek rovinného napětí σ zz = σ zx = σ yz = 0 má Hookeův zákon pro ortotropní materiál tvar

Inverzní vztah je

Často se také používá transponovaná forma výše uvedené matice tuhosti.
Příčně izotropní materiály
Příčně izotropní materiál je symetrický vzhledem k otáčení kolem osy symetrie . Pro takový materiál, pokud e 3 je osa symetrie, lze Hookův zákon vyjádřit jako

Častěji se osa x ≡ e 1 považuje za osu symetrie a inverzní Hookův zákon se zapisuje jako

Univerzální index elastické anizotropie
Abychom pochopili stupeň anizotropie jakékoli třídy, byl formulován univerzální index elastické anizotropie (AU). Nahrazuje Zenerův poměr , který je vhodný pro krychlové krystaly .
Termodynamický základ
Lineární deformace elastických materiálů lze aproximovat jako adiabatické . Za těchto podmínek a pro kvazistatické procesy lze první termodynamický zákon pro deformované těleso vyjádřit jako

kde δU je nárůst vnitřní energie a δW je práce odvedená vnějšími silami. Práci lze rozdělit do dvou termínů

kde δW s je práce odvedená povrchovými silami, zatímco δW b je práce odvedená silami těla . Pokud δ u je varianta výtlačného pole u v těle, pak se obě vnější pracovní podmínky může být vyjádřena jako

kde t je povrchový vektor tahu , b je vektor síly těla, Ω představuje tělo a ∂ Ω představuje jeho povrch. Pomocí vztahu mezi Cauchyovým napětím a povrchovým tahem, t = n · σ (kde n je jednotka směrem ven kolmá k ∂ Ω ), máme

Převedení povrchového integrálu na objemový integrál pomocí divergenční věty dává

Využití symetrie Cauchyho napětí a identity

máme následující

Z definice napětí a z rovnic rovnováhy máme

Proto můžeme psát

a proto je změna hustoty vnitřní energie dána vztahem

Elastický materiál je definován jako ten, ve kterém celkový vnitřní energie je rovna potenciální energii vnitřních sil (nazývané také elastické deformační energie ). Proto je hustota vnitřní energie funkcí kmenů, U 0 = U 0 ( ε ) a variace vnitřní energie může být vyjádřena jako

Protože variace napětí je libovolná, je vztah napětí -deformace elastického materiálu dán vztahem

U lineárního elastického materiálu množství ∂ U 0/∂ εje lineární funkcí ε , a lze ji proto vyjádřit jako

kde c je tenzor materiálových konstant čtvrté řady, nazývaný také tenzor tuhosti . Můžeme vidět, proč c musí být tenzorem čtvrté řady tím, že si všimneme, že pro lineární elastický materiál

V indexové notaci

Konstanta na pravé straně vyžaduje čtyři indexy a jedná se o veličinu na čtvrtém místě. Můžeme také vidět, že tato veličina musí být tenzorem, protože jde o lineární transformaci, která přenáší tenzor napětí na tenzor napětí. Můžeme také ukázat, že konstanta dodržuje pravidla transformace tenzoru pro tenzory čtvrté úrovně.
Viz také
Poznámky
Reference
externí odkazy
| Konverzní vzorce
|
| Homogenní izotropní lineární elastické materiály mají své elastické vlastnosti jednoznačně určené jakýmikoli dvěma moduly mezi nimi; tak, vzhledem k jakýmkoli dvěma, jakýkoli jiný z elastických modulů lze vypočítat podle těchto vzorců.
|
|
|

|

|

|

|

|

|
Poznámky
|

|
|
|

|

|

|

|
|

|
|

|
|

|

|

|
|

|
|

|

|
|

|

|
|

|
|

|

|

|
|

|
|

|
|

|

|

|

|
|
|

|

|
|
|

|

|

|

|

|

|
|

|
|

|

|
|

|

|
|

|

|
|

|
|

|

|
|

|

|

|
|

Existují dvě platná řešení.
Znaménko plus vede k .
Znaménko mínus vede k .
|

|

|

|
|
|

|

|
|

|

|

|
|

|
|

|
Nelze použít, když 
|

|

|

|
|

|

|
|
|

|

|

|

|
|
|

|
|

|

|

|

|
|

|
|
|

|

|

|

|

|
|
|
|







