
Planimetr - Planimeter
Planimetr , také známý jako platometer , je měřicí přístroj používá k určení plochy s libovolnou dvourozměrného tvaru.
Konstrukce
Existuje několik druhů planimetrů, ale všechny fungují podobným způsobem. Přesný způsob, jakým jsou konstruovány, se liší, přičemž hlavní typy mechanických planimetrů jsou polární, lineární a Prytzovy nebo „sekerové“ planimetry. Švýcarský matematik Jakob Amsler-Laffon sestrojil první moderní planimetr v roce 1854, tento koncept byl průkopníkem Johanna Martina Hermanna v roce 1814. Mnoho vývojů následovalo po slavném Amslerově planimetru, včetně elektronických verzí.

Polární planimetr

Planimetr (1908) měřící vyznačenou oblast sledováním jejího obvodu

Amslerův polární planimetr

Lineární planimetr. Kola umožňují měření dlouhých ploch bez omezení.

Tři planimetry: digitální, Prytzův (sekerka) a Amslerův (polární)

Prytz planimetr s kolečkem vlevo






Amslerův (polární) typ se skládá ze dvoubarevného propojení. Na konci jednoho odkazu je ukazatel, který se používá k trasování kolem hranice měřeného tvaru. Druhý konec závěsu se volně otáčí na závaží, které mu brání v pohybu. Blízko spojení obou článků je měřicí kolo kalibrovaného průměru se stupnicí pro jemné otáčení a šnekovým převodem pro pomocnou stupnici počítadla otáček. Když je obrys oblasti vysledován, toto kolečko se valí po povrchu výkresu. Operátor nastaví kolo, otočí počítadlo na nulu a poté vystopuje ukazatel po obvodu obrazce. Když je trasování dokončeno, váhy na měřicím kolečku ukazují oblast tvaru.
Když se měřicí kolečko planimetru pohybuje kolmo na jeho osu, otočí se a tento pohyb je zaznamenán. Když se měřicí kolo pohybuje rovnoběžně s jeho osou, kolo se smykem pohybuje, takže tento pohyb je ignorován. To znamená, že planimetr měří vzdálenost, kterou urazí jeho měřicí kolo, promítnut kolmo na osu otáčení měřicího kola. Plocha tvaru je úměrná počtu závitů, kterými se měřící kolo otáčí.
Polární planimetr je konstrukčně omezen na měření oblastí v mezích určených jeho velikostí a geometrií. Lineární typ však nemá žádné omezení v jedné dimenzi, protože se může kutálet. Jeho kola nesmí prokluzovat, protože pohyb musí být omezen na přímku.
Vývoj planimetru může stanovit polohu prvního momentu oblasti ( těžiště ) a dokonce i druhého momentu oblasti .

Lineární planimetr
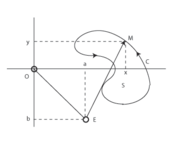
Polární planimetr


Obrázky ukazují principy lineárního a polárního planimetru. Ukazatel M na jednom konci planimetru sleduje obrys C měřeného povrchu S. U lineárního planimetru je pohyb „kolena“ E omezen na osu y . U polárního planimetru je „koleno“ spojeno s ramenem s jeho druhým koncovým bodem O v pevné poloze. K rameni ME je připojeno měřicí kolo s osou otáčení rovnoběžnou s ME. Pohyb paže ME lze rozložit na pohyb kolmý na ME, což způsobí, že se kolo otáčí, a pohyb rovnoběžný s ME, což způsobí smyk kola, aniž by to přispělo k jeho čtení.
Zásada

Fungování lineárního planimetru lze vysvětlit měřením plochy obdélníku ABCD (viz obrázek). Pohybem ukazatele z A do B se rameno EM pohybuje žlutým rovnoběžníkem s plochou rovnající se PQ × EM. Tato oblast se také rovná ploše rovnoběžníku A "ABB". Měřicí kolečko měří vzdálenost PQ (kolmo na EM). Při pohybu z C do D se rameno EM pohybuje zeleným rovnoběžníkem s plochou rovnou ploše obdélníku D „DCC“. Měřicí kolečko se nyní pohybuje v opačném směru a odečte tento údaj od prvního. Pohyby podél BC a DA jsou stejné, ale opačné, takže se navzájem ruší bez čistého účinku na čtení kola. Čistým výsledkem je měření rozdílu žluté a zelené plochy, což je plocha ABCD.
Matematická derivace
Činnost lineárního planimetru lze odůvodnit aplikací Greenovy věty na složky vektorového pole N, dané:

kde b je y -souřadnice lokte E.
Toto vektorové pole je kolmé na měřicí rameno EM:

a má konstantní velikost, která se rovná délce m měřicího ramene:

Pak:
![{\ begin {aligned} & \ mast _ {C} (N_ {x} \, dx+N_ {y} \, dy) = \ iint _ {S} \ left ({\ frac {\ partial N_ {y} } {\ částečné x}}-{\ frac {\ částečné N_ {x}} {\ částečné y}} \ vpravo) \, dx \, dy \\ [8pt] = {} & \ iint _ {S} \ vlevo ({\ frac {\ částečný x} {\ částečný x}}-{\ frac {\ částečný (o)} {\ částečný y}} \ pravý) \, dx \, dy = \ iint _ {S} \ , dx \, dy = A, \ end {zarovnáno}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64a2f73ed15c9c96a4fb93c787ad1161d8feb908)
protože:

Levá strana výše uvedené rovnice, která se rovná oblasti A uzavřené obrysem, je úměrná vzdálenosti měřené měřicím kolem, s faktorem proporcionality m , délkou měřicího ramene.
Odůvodnění výše uvedené derivace spočívá v tom, že lineární planimetr zaznamenává pouze pohyb kolmý na své měřicí rameno, nebo když
- je nenulová. Když je toto množství integrováno do uzavřené křivky C, následuje Greenova věta a oblast.

Polární souřadnice
Souvislost s Greenovou větou lze chápat z hlediska integrace v polárních souřadnicích : v polárních souřadnicích je plocha počítána integrálem, kde integrovaný tvar je kvadratický v r, což znamená, že rychlost, s jakou se oblast mění s ohledem na změnu úhlu se mění kvadraticky s poloměrem.

Pro parametrickou rovnici v polárních souřadnicích, kde se r i θ mění jako funkce času, to platí

U polárního planimetru je celková rotace kola úměrná, protože rotace je úměrná ujeté vzdálenosti, která je v kterémkoli časovém okamžiku úměrná poloměru a změně úhlu, jako je tomu u obvodu kruhu ( ).


Tento poslední integrand lze rozpoznat jako derivát dřívějšího integrandu (s ohledem na r ) a ukazuje, že polární planimetr vypočítá oblast integrálu z hlediska derivace , což se odráží v Greenově větě, která rovná liniovému integrálu funkce na (1-dimenzionálním) obrysu na (2-dimenzionálním) integrálu derivátu.


Viz také
Reference
- Bryant, John; Sangwin, Chris (2007), „Kapitola 8: Pronásledování věšáků na kabáty“ , Jak kulatý je váš kruh?: Kde se setkává inženýrství a matematika , Princeton University Press, s. 138–171, ISBN 978-0-691-13118-4
- Gatterdam, RW (1981), „The planimeter as an example of Green's theorem“, The American Mathematical Monthly , 88 (9): 701–704, doi : 10,2307/2320679 , JSTOR 2320679
- Hodgson, John L. (1. dubna 1929), „Integration of flow meter diagrams“, Journal of Scientific Instruments , 6 (4): 116–118, Bibcode : 1929JScI .... 6..116H , doi : 10.1088/0950 -7671/6/4/302
- Horsburgh, EM (1914), Napier Celebration: Celebration: Handbook of the Exhibition of Napier Relics and of Books, Instruments, and Devices for facilitating Calculation , The Royal Society of Edinburgh
- Jennings, G. (1985), Modern Geometry with Applications , Springer
- Lowell, LI (1954), „Komentáře k polárnímu planimetru“, The American Mathematical Monthly , 61 (7): 467–469, doi : 10,2307/2308082 , JSTOR 2308082
- Wheatley, JY (1908), Polární planimetr , New York: Keuffel & Esser, ISBN 9785878586351
externí odkazy
- Hatchetový planimetr
- P. Kunkel: Whistleralley site, The Planimeter
- Larryho planimetrový talíř
- Stránka Würzburgského planimetru
- Stránka planimetru Roberta Footeho
- Počítačový model planimetru
- Tanya Leise ‚s Planimeter vysvětlení a Jak kolo otáčí planimetru je
- Vytvořte jednoduchý planimetr
- Foto: Geografové využívající planimetry (1940–1941)
- O. Knill a D. Winter: Greenova věta a planimetr