
Sojourner (rover) - Sojourner (rover)

Pobytový rover na snímku od Landhfindera Landera
| |
| Typ mise | Mars rover |
|---|---|
| Operátor | NASA |
| webová stránka | Oficiální webové stránky |
| Délka mise | Plánováno: 7 solů (7 dní) Konec mise: 83 solů (85 dní) Od příletu na Mars |
| Vlastnosti kosmických lodí | |
| Suchá hmota | 11,5 kilogramu (pouze rover) |
| Začátek mise | |
| Datum spuštění | 04.12.1996, 06:58:07 UTC |
| Raketa | Delta II 7925 D240 |
| Spusťte web | Mys Canaveral LC-17B |
| Dodavatel | McDonnell Douglas |
| Nasazeno z | Mars Pathfinder |
| Datum nasazení | 5. července 1997 |
| Konec mise | |
| Poslední kontakt | 27. září 1997 |
| Přistávací modul na Marsu | |
| Datum přistání | 4. července 1997 16:56:55 UTC |
| Přistávací místo |
Ares Vallis , Chryse Planitia , Mars 19 ° 7'48 "N 33 ° 13'12" W / 19,13 000 ° severní šířky 33,22 000 ° západní délky |
 Náplast mise Mars Pathfinder
Rovery NASA Mars
| |
Sojourner je robotický Mars rover , který přistál v Ares Vallis kanálu v Chryse Planitia oblasti Oxia Palus čtyřúhelníku dne 4. července 1997. Sojourner byla v provozu na Marsu za 92 solů (95 dní Zemi). Jednalo se o první kolové vozidlo, které vyletělo na jinou planetu než Zemi a bylo součástímise Mars Pathfinder .
Rover byl vybaven přední a zadní kamerou a hardwarem, který byl použit k provedení několika vědeckých experimentů. Byl navržen pro misi trvající 7 solů s možným rozšířením na 30 solů a byl aktivní po dobu 83 solů (85 pozemských dní). Rover komunikoval se Zemí prostřednictvím základnové stanice Pathfinder , která měla poslední úspěšné komunikační spojení se Zemí ve 3:23 hod. PDT 27. září 1997. Poslední signál z roveru byl přijat ráno 7. října 1997.
Sojourner cestoval jen něco málo přes 100 metrů (330 ft) v době, kdy dojde k přerušení komunikace. Jeho konečným potvrzeným velením bylo zůstat nehybný do 5. října 1997 (sol 91) a poté jet kolem přistávacího modulu; nic nenasvědčuje tomu, že by toho bylo možné. Sojourner mise oficiálně skončil 10. března 1998, poté, co všechny další možnosti byly vyčerpány.
Mise

Sojourner byl experimentální vůz, jehož hlavním posláním bylo testovat v marťanském prostředí technická řešení, která byla vyvinuta inženýry výzkumných laboratoří NASA. Bylo nutné ověřit, zda použitá strategie návrhu vedla ke konstrukci vozidla vhodného pro prostředí, s nímž se setká, a to navzdory omezeným znalostem. Pečlivá analýza operací na Marsu by umožnila vyvinout řešení identifikovaných kritických problémů a zavést vylepšení pro další mise planetárního průzkumu. Jedním z hlavních cílů mise bylo dokázat, že je možný vývoj „rychlejších, lepších a levnějších“ kosmických lodí. Vývoj trval tři roky a stál méně než 150 milionů dolarů za přistávací modul a 25 milionů za rover; vývoj byl rychlejší a méně nákladný než všechny předchozí mise.
Zvláště inovativními aspekty byly poloautomatické navigační a lokomoční systémy. Účinky marťanského prachu na fotovoltaické panely, které poháněly přistávací modul a rover, nebyly s jistotou známy.
Tyto cíle vyžadovaly pečlivý výběr místa přistání, aby se vyrovnaly technické požadavky s vědeckými. K přistání sondy a skalnatého terénu k ověření systémů roveru byla zapotřebí velká planina. Volba padla na Ares Vallis v Chryse Planitia , která se vyznačuje naplavenými skalními útvary. Vědci se domnívali, že analýza hornin, které leží ve vývodu obrovského odvodňovacího kanálu, mohla potvrdit přítomnost kapalné vody na povrchu Marsu v minulosti a poskytnout podrobnosti o okolních oblastech, ze kterých byly horniny nahlodal.
Technická charakteristika


Sojourner byl vyvinut NASA Jet Propulsion Laboratory (JPL). Jedná se o šestikolové vozidlo o délce 65 cm (26 palců), šířce 48 cm (19 palců) a výšce 30 cm (12 palců). Ve fázi plavby mise zabírala 18 cm (7,1 palce) vysoký prostor a měla hmotnost 11,5 kg (25 lb). Byl podepřen přistávacím modulem, strukturou ve tvaru čtyřstěnu o hmotnosti 250 kg (550 lb) a měl kameru, vědecké přístroje, tři okvětní lístky solárních panelů, meteorologický stožár a 6 kg (13 lb) zařízení to bylo nutné k udržení komunikace mezi roverem a landerem. Hardware zahrnoval řiditelnou anténu v pásmu X s vysokým ziskem, která dokázala odeslat přibližně 5,5 kilobitů za sekundu do 70 m (230 stop) antény Deep Space Network , 3,3 m 2 (36 sq ft) solárních polí s gallium-arsenidem, která generovala 1100 W -hr/den a byly schopné poskytnout dostatek energie k přenosu po dobu 2–4 hodin na sol a udržovat 128 megabajtů dynamické paměti přes noc.
Lander

Jedním z hlavních úkolů přistávacího modulu byla podpora roveru zobrazováním jeho operací a odesíláním dat z roveru na Zemi. Přistávací modul měl na okvětních lístcích dobíjecí baterie a více než 2,5 m (8,2 ft) solárních článků. Přistávací modul obsahoval stereoskopickou kameru s prostorovými filtry na rozšiřitelném pólu s názvem Imager for Mars Pathfinder (IMP) a Atmosphere Structure Instrument/Meteorology Package (ASI/MET), které fungovaly jako meteorologická stanice na Marsu a shromažďovaly údaje o tlaku, teplotě, a větry. Struktura MET zahrnovala tři návleky namontované ve třech výškách na sloupu, nejvyšší asi jeden metr (3,3 ft) a obecně registrované větry od západu. Aby byla zajištěna kontinuální data, zobrazoval IMP větrné návleky jednou za denní světelnou hodinu. Tato měření umožnila měřit eolianské procesy v místě přistání, včetně prahu částic a aerodynamické drsnosti povrchu.
Čtvercové oči kamery IMP jsou od sebe odděleny 15 cm (5,9 palce), aby poskytovaly stereoskopické vidění a rozsah výkonu na podporu operací roveru. Duální optické cesty jsou složeny dvěma sadami zrcadel, aby se světlo dostalo do zařízení s jediným nábojem (CCD). Aby se minimalizovaly pohyblivé části, je IMP elektronicky uzavřen; polovina CCD je maskována a použita jako odečtová zóna pro elektronickou závěrku . Optika měla efektivní rozlišení pixelu jeden miliradián na pixel, což dává 1 mm (0,039 palce) na pixel v rozsahu jednoho metru (3 ft 3 palce). Válec kamery je namontován na kardanech, které poskytují volnost otáčení o 360 ° v azimutu a -67 ° až +90 ° ve výšce. Tato sestava je podporována výsuvným stožárem, který byl navržen a vyroben společností AEC Able Engineering . Stožár drží kameru na přibližně 1,5 m (4,9 ft) nad povrchu Marsu a rozšiřuje Pathfinder ' s horizont na 3,4 km (2,1 mi) na beztvaré rovině.
Napájecí systém

Sojourner měl solární panely a nenabíjecí lithium-thionylchloridovou (LiSOCl 2 ) baterii, která dokázala poskytnout 150 watthodin a umožňovala omezené noční operace. Jakmile byly baterie vybité, mohl rover fungovat pouze ve dne. Baterie také umožňovaly kontrolovat zdraví roveru, když byly uzavřeny ve fázi plavby na cestě na Mars. 0,22 m 2 (2,4 sq ft) solárních článků by na Marsu mohlo produkovat maximálně asi 15 wattů, v závislosti na podmínkách. Články byly GaAs/Ge ( Gallium Arsenide/Germanium ) s přibližně 18procentní účinností. Mohli přežít teploty až do asi -140 ° C (-220 ° F). Po asi 40. solu na Marsu již baterie landeru nevydržela, takže bylo rozhodnuto vypnout rover před západem slunce a probudit ho při východu slunce.
Pohybový systém


Kola roveru byla vyrobena z hliníku a měla průměr 13 cm (5,1 palce) a šířku {7,9 cm (3,1 palce). Měli zoubkované pásy z nerezové oceli, které dokázaly v optimálních podmínkách na měkkém podkladu generovat tlak 1,65 kilopascalu. Během operační fáze taková potřeba nevznikla. Každé kolo bylo poháněno vlastním nezávislým motorem. K řízení bylo použito první a třetí kolo. Uvažovalo se o konfiguraci řízení na šest kol, ale to bylo příliš těžké. Jak se rover otáčel, nakreslil kruh široký 74 cm (29 palců).
Kola byla připojena k rámu pomocí speciálně vyvinutého zavěšení, aby bylo zajištěno, že všech šest bylo v kontaktu se zemí, a to i na nerovném terénu. Don Bickler z JPL vyvinul kola, která byla označována jako „ Rocker-bogie “, pro experimentální vozidla „Rocky“, jejichž osmá verze je Sojourner . Skládaly se ze dvou prvků; „Bogie“ spojil přední kolo s centrálním a „Rocker“ spojil zadní kolo s dalšími dvěma. Systém neobsahoval pružiny ani jiné elastické prvky, které by mohly zvýšit tlak vyvíjený každým kolem. Tento systém umožňoval překonávání překážek až do výšky 8 cm (3,1 palce), ale teoreticky by umožnil roveru překonávat překážky rovné asi 30% délky roveru (20 cm (7,9 palce)). Systém odpružení dostal také schopnost zhroutit se na sebe, aby rover v cestovní konfiguraci zabíral 18 cm (7,1 palce).
Bylo zjištěno, že pohybový systém je vhodný pro prostředí Marsu - je velmi stabilní a umožňuje pohyby vpřed i vzad s podobnou lehkostí - a byl přijat s příslušnými opatřeními v následujících misích roveru Spirit a Opportunity .
V desetileté fázi vývoje, která vedla k realizaci Sojourner , byla zkoumána alternativní řešení, která by mohla využít dlouholetých zkušeností získaných v JPL při vývoji vozidel pro Měsíc a Mars. Použití čtyř a více nohou bylo vyloučeno ze tří důvodů: nízký počet nohou by omezil pohyby roveru a svobodu jednání a zvýšení počtu by vedlo k významnému zvýšení složitosti. Pokračování v této konfiguraci by také vyžadovalo znalost prostoru vpředu - země odpovídající dalšímu kroku - což by vedlo k dalším obtížím. Volba kolového vozidla vyřešila většinu problémů se stabilitou, vedla ke snížení hmotnosti a zlepšila účinnost a ovládání ve srovnání s předchozím řešením. Nejjednodušší konfigurací byl čtyřkolový systém, který však naráží na potíže při překonávání překážek. Lepším řešením bylo použití šesti nebo osmi kol se zadními, která byla schopná tlačit, což umožňovalo překonání překážky. Upřednostňována byla lehčí, jednodušší, šestikolová varianta.
Rover mohl cestovat 500 m (1600 stop) od přistávacího modulu - přibližný limit jeho komunikačního dosahu - a měl maximální rychlost 1 cm/s (0,39 palce/s).
Hardware a software

Příchozí‘ je centrální procesorová jednotka (CPU) byl Intel 80C85 s hodinami 2 MHz, adresování 64 kilobajtů (KB) paměti a spuštění cyklický výkonné . Měla čtyři paměti; 64 Kb RAM vyrobených IBM pro hlavní procesor, 16 Kb radiačně tvrzeného PROM od Harris, 176 Kb energeticky nezávislého úložiště od Seeq Technology a 512 Kb dočasného datového úložiště od Micronu. Elektronika byla umístěna uvnitř teplého elektronického boxu roveru (WEB). WEB je krabicová struktura vytvořená ze sklolaminátových čelních plechů spojených s hliníkovými nosníky. Mezery mezi plochami byly vyplněny bloky aerogelu, které fungovaly jako tepelná izolace . Aerogel použitý na Sojourner měl hustotu přibližně 20 mg/cm3. Tento izolátor byl navržen tak, aby zachytil teplo generované elektronikou roveru; toto zachycené teplo nasáklo v noci pasivní izolací a udržovalo elektroniku na WEBu mezi -40 ° C (-40 ° F) a 40 ° C (104 ° F), zatímco zvenčí měl rover teplotní rozsah mezi 0 ° C (32 ° F) a −110 ° C (−166 ° F).
Na Pathfinder počítač Lander byl radiačně odolné IBM Risc 6000 Single Chip s Rad6000 SC CPU 128 megabajtů (MB) paměti RAM a 6 Mb EEPROM paměti, a jeho operační systém byl VxWorks .
Mise byla ohrožena souběžnou chybou softwaru v přistávacím modulu, která byla nalezena při testování před letem, ale byla považována za závadu a měla nízkou prioritu, protože k ní došlo pouze v určitých neočekávaných podmínkách vysokého zatížení a důraz byl kladen na ověření zadání a přistávací kód. Problém, který byl reprodukován a opraven ze Země pomocí laboratorního duplikátu, byl způsoben resetováním počítače způsobeným prioritní inverzí . Po restartu počítače nebyla ztracena žádná vědecká ani technická data, ale všechny následující operace byly přerušeny až do dalšího dne. K resetování došlo 5., 10., 11. a 14. července během mise, než byl software 21. července opraven, aby byla zajištěna prioritní dědičnost .
Komunikace a kamery
Sojourner komunikoval se svou základnovou stanicí pomocí 9600 baudového rádiového modemu, ačkoli protokoly o kontrole chyb omezily komunikaci na funkční rychlost 2400 baudů s teoretickým dosahem asi půl kilometru (0,31 mi). Za normálního provozu by pravidelně vysílalo na přistávací modul zprávu „ prezenční signál “. Pokud nedojde k žádné reakci, mohl by se rover autonomně vrátit do místa, kde byl přijat poslední tep. Pokud je to žádoucí, mohla by být stejná strategie použita k záměrnému prodloužení provozního dosahu roveru nad rámec jeho rádiového transceiveru, ačkoli rover během své mise jen zřídka cestoval dál než 10 metrů (33 ft) od Pathfinderu . Tyto Ultra vysoká frekvence (UHF) rádiové modemy provozovány poloduplexní režim, což znamená, že by buď odesílat nebo přijímat data, ale ne oba současně. Data byla sdělena v dávkách 2 kB.
Rover měl vpředu dvě jednobarevné kamery a vzadu barevnou kameru. Každá přední kamera měla řadu 484 pixelů na výšku a 768 na šířku. Obě přední kamery byly spojeny s pěti projektory s laserovými proužky, které umožňovaly pořizování stereoskopických snímků spolu s měřením pro detekci nebezpečí na dráze roveru. Optika se skládala z okna, čočky a zplošťovače pole. Okno bylo vyrobeno ze safíru, zatímco objektiv objektivu a zplošťovač byly vyrobeny ze selenidu zinečnatého . Barevná kamera se stejným rozlišením byla umístěna na zadní straně roveru poblíž APXS a byla otočena o 90 °. Poskytla snímky cílové oblasti APXS a pozemních drah roveru. Senzor této barevné kamery byl uspořádán tak, aby 12 ze 16 pixelů bloku 4 × 4 pixelů bylo citlivých na zelené světlo; zatímco 2 pixely byly citlivé na červené světlo a další 2 byly citlivé na infračervené a modré světlo. Kamery používaly CCD vyráběné společností Eastman Kodak Company ; byly taktovány CPU a byly schopné automatické expozice , komprese dat BTC ( Block Truncation Coding ) , špatného zpracování pixelů/sloupců a balení dat obrazových dat. Protože fotoaparáty vozítka měly zinkolenové čočky, které blokují světlo s vlnovou délkou kratší než 500 nanometrů (nm), ve skutečnosti žádné modré světlo nedosáhlo na pixely citlivé na modrou a infračervenou oblast, které proto zaznamenávaly pouze infračervené světlo. Rover byl na Marsu zobrazen kamerovým systémem IMP základny, který také pomohl určit, kam by měl rover zamířit.
Software Rover Control
Operaci Sojourner podporoval „Rover Control Software“ (RCS), který běžel na počítači Silicon Graphics Onyx2 na Zemi a umožňoval generování sekvencí příkazů pomocí grafického rozhraní. Řidič roveru by nosil 3D brýle dodávané se snímky ze základny a pohyboval by virtuálním modelem se specializovaným joystickem. Řídicí software umožňoval prohlížet rover a okolní terén z jakéhokoli úhlu, což podporovalo studium vlastností terénu, umísťování trasových bodů a virtuální přelet. Šipky byly použity jako ikony, které ukazovaly, kam by měl rover směřovat. Požadovaná místa byla přidána do sekvence a odeslána do roveru k provedení. Obvykle se skládala a posílala dlouhá sekvence příkazů jednou denně. Řidiči vozítka byli Brian K. Cooper a Jack Morrison.

Příklad obrazovky, která vizualizovala povrch Marsu, používaná řidičem roveru

Příklad rozhraní „virtuální reality“, které řidiči umožňovalo vidět povrch z jakéhokoli úhlu kolem roveru
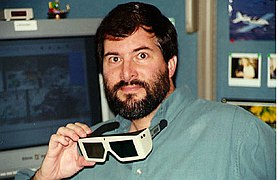
Brian K. Cooper, řidič primárního vozítka, se stereo brýlemi

Cooper ve stereo googlech pracujících s RCS




Věda užitečné zatížení
Rentgenový spektrometr Alpha Proton


Alpha Proton X-Ray Spectrometer (apxs) byl navržen tak, aby určení chemického složení a na Marsu půdy , hornin a prachu analýzou vratné záření v jeho alfa, protonu, a X-ray složky vyplývající z expozice vzorku do radioaktivního zdroje obsažené v nástroji. Přístroj měl zdroj curium -244, který emituje částice alfa s energií 5,902 MeV. Část dopadajícího záření, které dopadlo na povrch analyzovaného vzorku, byla odražena a zbytek reagoval se vzorkem.
Princip techniky APXS je založen na interakci částic alfa z radioizotopového zdroje s hmotou. Existují tři složky zpětného záření; jednoduchý zpětný rozptyl Rutherforda , produkce protonů z reakcí s jádrem světelných prvků a generování rentgenových paprsků při rekombinaci volných míst atomového obalu vytvořeného bombardováním alfa částicemi interakcí s elektrony nejvnitřnějších orbitálů. Přístroj byl navržen tak, aby detekoval energii všech tří složek zpětného záření, což umožnilo identifikovat přítomné atomy a jejich množství v několika desítkách mikrometrů pod povrchem analyzovaného vzorku. Proces detekce byl poměrně pomalý; každé měření může trvat až deset hodin.
Citlivost a selektivita závisí na kanálu; alfa zpětný rozptyl má vysokou citlivost na lehké prvky, jako je uhlík a kyslík , emise protonů je citlivá hlavně na sodík , hořčík , hliník , křemík , síru a rentgenové záření je citlivější na těžší prvky sodík na železo a mimo něj. Díky kombinaci všech tří měření je APXS citlivý na všechny prvky s výjimkou vodíku, který je přítomen v koncentračních úrovních nad zlomkem jednoho procenta. Přístroj byl navržen pro neúspěšnou ruskou misi Mars-96 . Detektory alfa částic a protonů poskytlo oddělení chemie Institutu Maxe Plancka a detektor rentgenových paprsků vyvinutý Chicagskou univerzitou .
Při každém měření musel být přední povrch přístroje v kontaktu se vzorkem. Aby to bylo možné, byl APXS namontován na robotické rameno zvané Mechanismus nasazení spektrometru Alpha-Proton-X-ray Spectrometer (ADM). ADM byl antropomorfní pohon, který byl vybaven zápěstím, které bylo schopné otáčet se o ± 25 °. Dvojitá mobilita roveru a ADM zvýšila potenciál nástroje - prvního svého druhu, který se dostal na Mars.
Experiment s oděrem kol

Experiment WAE (Wheel Abrasion Experiment) byl navržen tak, aby měřil abrazivní účinek marťanské půdy na tenké vrstvy hliníku, niklu a platiny, a tak odvodil velikost zrna půdy v místě přistání. Za tímto účelem bylo na jedno ze dvou středových kol o tloušťce mezi 200 a 1000 ångström namontováno 15 vrstev - pět z každého kovu - a elektricky izolovány od zbytku roveru. Správným nasměrováním kola se sluneční světlo odráželo směrem k blízkému fotovoltaickému senzoru . Shromážděný signál byl analyzován k určení požadované informace. Aby byl abrazivní účinek v plánu mise významný, bylo naplánováno, že se rover bude v častých intervalech zastavovat a při brzdění dalších pěti kol donutí kolo WAE otáčet, což způsobí zvýšené opotřebení. Po experimentu WAE na Marsu byly provedeny pokusy reprodukovat efekty pozorované v laboratoři.
Interpretace výsledků navržená Fergusonem et al . navrhuje, aby byla půda v místě přistání tvořena jemnozrnným prachem omezené tvrdosti s velikostí zrn menší než 40 µm. Přístroj byl vyvinut, vyroben a řízen Lewisovou pobočkou Photovoltaics and Space Environments z Glenn Research Center .
Experiment s dodržováním materiálů
Experiment s adhezí materiálů (MAE) byl navržen inženýry z Glenn Research Center k měření denní akumulace prachu na zadní straně vozítka a snížení kapacity přeměny energie fotovoltaických panelů. Skládal se ze dvou senzorů.
První byl složen z fotovoltaického článku pokrytého průhledným sklem, které bylo možné na povel odstranit. Blízko místního poledne byla provedena měření energetického výtěžku buňky, obě s nasazeným sklem a odstraněné. Ze srovnání bylo možné odvodit snížení výtěžku buněk způsobené prachem. Výsledky z prvního článku byly porovnány s výsledky druhého fotovoltaického článku, který byl vystaven marťanskému prostředí. Druhý snímač používal mikrováhy z křemenných krystalů (QCM) k měření jednotky hmotnosti prachu na povrchu usazené na senzoru.
Během mise byla zaznamenána denní sazba rovnající se 0,28% procentního snížení energetické účinnosti fotovoltaických článků. To bylo nezávislé na tom, zda byl rover nehybný nebo v pohybu. To naznačuje, že prach usazující se na roveru byl suspendován v atmosféře a nebyl zvýšen pohyby roveru.
Kontrolní systém

Vzhledem k tomu, že bylo zjištěno, že přenosy týkající se řízení Sojourneru se vyskytují jednou za každý sol, byl rover vybaven počítačovým řídicím systémem, který řídil jeho pohyby nezávisle.
Byla naprogramována řada příkazů, které poskytují vhodnou strategii pro překonávání překážek. Jedním z hlavních příkazů bylo „Přejít na waypoint“. Předpokládal se místní referenční systém, jehož původem byl přistávací modul. Směr souřadnic byl v okamžiku přistání stanoven, přičemž jako referenční směr byl použit sever. Během komunikační relace obdržel rover ze Země příkazový řetězec obsahující souřadnice bodu příjezdu, ke kterému by musel autonomně dosáhnout.
Algoritmus implementovaný na palubním počítači se pokusil jako první možnost dosáhnout překážky v přímé linii z výchozí polohy. Pomocí systému fotografických objektivů a laserových zářičů mohl rover identifikovat překážky na této cestě. Palubní počítač byl naprogramován tak, aby na snímcích z kamer vyhledával signál generovaný lasery. V případě rovného povrchu a bez překážek se poloha tohoto signálu nezměnila s ohledem na referenční signál uložený v počítači; jakákoli odchylka od této polohy umožnila identifikovat typ překážky. Fotografické skenování bylo provedeno po každém posunutí rovnajícím se průměru kol (13 cm (5,1 palce)) a před každým otočením.

Při potvrzené přítomnosti překážky počítač nařídil provedení první strategie, aby se jí vyhnul. Rover, stále sám, se otáčel, dokud překážka již nebyla v dohledu. Poté, co postoupil na polovinu své délky, přepočítal novou přímou cestu, která ji dovedla k bodu příjezdu. Na konci postupu počítač neměl paměť na existenci překážky. Úhel natočení kol byl řízen potenciometry .
Ve zvláště nerovném terénu by výše popsanému postupu zabránila přítomnost velkého počtu překážek. Existoval tedy druhý postup známý jako „navlečení jehly“, který spočíval v postupu mezi dvěma překážkami podél půlící čáry mezi nimi za předpokladu, že byly dostatečně vzdáleny, aby umožnily roveru projít. Pokud by rover narazil na mýtinu před dosažením předem stanovené vzdálenosti, musel by se sám otočit, aby vypočítal novou přímou trajektorii k dosažení cíle. Naopak, rover by se musel vrátit a zkusit jinou trajektorii. Jako poslední možnost byly na přední a zadní povrchy roveru namontovány kontaktní senzory.
Aby se usnadnilo směrování roveru, bylo možné ze Země přikázat vhodnou rotaci na místě. Příkaz byl „Turn“ a byl proveden pomocí gyroskopu . Tři akcelerometry měřily gravitační zrychlení ve třech kolmých směrech, což umožňovalo měřit sklon povrchu. Rover byl naprogramován tak, aby se odchýlil od tras, které by vyžadovaly sklon větší než 30 °, ačkoli byl navržen tak, aby se nepřevrátil, když byl nakloněn o 45 °. Ujetá vzdálenost byla určena počtem otáček kol.
Marie Curie

Marie Curie je náhradní letenka pro Sojourner . Během operační fáze na Marsu byly na tomto identickém roveru v JPL ověřeny sekvence nejsložitějších příkazů, které mají být odeslány Sojournerovi . NASA plánovala vyslat Marie Curie na zrušenou misi Mars Surveyor 2001 ; bylo navrženo jej odeslat v roce 2003 a navrhnout, aby byla Marie Curie nasazena „pomocí robotické paže připojené k přistávacímu modulu“. Spíše než toto, Mars Exploration Rover Program byl zahájen v roce 2003. V roce 2015, JPL převedena Marie Curie do Smithsonian Národní muzeum letectví a vesmír (NASM).
Podle vesmírného historika a kurátora NASM Matta Shindella:
Marie Curie rover byl plně funkční jednotka, nejsem si jistý, v jakém bodě bylo rozhodnuto, který se chystá k letu a který zůstane doma, ale byl připraven nahradit hlavní jednotky v co nejkratší době.
Mars Yard

Pro testování robotických prototypů a aplikací za přirozených světelných podmínek vybudovala JPL simulovanou marťanskou krajinu s názvem „Mars Yard“. Zkušební plocha měřila 21 m (69 stop) x 22 m (72 stop) a měla různé terénní úpravy, které podporovaly více testovacích podmínek. Půda byla kombinací plážového písku, rozložené žuly, cihlového prachu a vulkanických popelů. Skály byly několika druhy čedičů, včetně jemnozrnných a vezikulárních v červené i černé. Distribuce velikosti hornin byla vybrána tak, aby odpovídala těm, které jsou vidět na Marsu, a charakteristiky půdy odpovídaly těm, které se nacházejí v některých marťanských oblastech. Velké kameny neměly složení podobné Marsu, byly pro testování méně husté a snadno se pohybovaly. Jiné překážky, jako jsou cihly a příkopy, byly často používány pro specializované testování. Mars Yard byl rozšířen v roce 1998 a poté v roce 2007, aby podporoval další mise Mars rover.
Pojmenování

Jméno „Sojourner“ bylo pro rover vybráno prostřednictvím soutěže, kterou v březnu 1994 uspořádala Planetární společnost ve spolupráci s JPL; probíhala jeden rok a byla otevřena studentům od 18 let z jakékoli země. Účastníci byli pozváni, aby si vybrali „hrdinku, které zasvětí rover“, a napsali esej o jejích úspěších a o tom, jak by tyto úspěchy mohly být aplikovány na marťanské prostředí. Iniciativa byla zveřejněna ve Spojených státech prostřednictvím vydání časopisu Science and Children z ledna 1995 vydaného National Association Teachers Association .
Bylo obdrženo 3 500 příspěvků ze zemí včetně Kanady, Indie, Izraele, Japonska, Mexika, Polska, Ruska a Spojených států, z toho 1700 od studentů ve věku od 5 do 18 let. Vítězové byli vybráni na základě kvality a kreativity práce, vhodnost názvu pro marťanský rover a znalosti konkurence o hrdince a misi sondy.
Vítěznou práci napsala 12letá Valerie Ambroise z Bridgeportu v Connecticutu, která navrhla věnovat rover Sojourner Truth , afroamerické abolicionistce z období občanské války a zastánkyni práv žen.
Druhé místo obsadila 18letá Deepti Rohatgi z Rockville v Marylandu , která navrhla Marie Curie , francouzsko-polskou chemičku, která získala Nobelovu cenu. Třetí místo obsadil 16letý Adam Sheedy z Round Rock v Texasu, který si vybral Judith Resnik , americkou astronautku a člena posádky raketoplánu, který zemřel při katastrofě Challenger v roce 1986 . Rover byl také známý jako Microrover Flight Experiment zkráceně MFEX.
Operace

Sojourner byl zahájen dne 4. prosince 1996, na palubě Delta II booster, a dosáhl Marsu 4. července 1997. Je provozován v Ares Vallis kanálu v Chryse Planitia na Oxia Palus čtyřúhelníku , od 5. července do 27. září 1997, kdy přistávací modul přerušil komunikaci se Zemí. Během 83 solů aktivity - dvanáctkrát delší než předpokládaná doba pro rover - cestoval Sojourner 104 m (341 ft), vždy zůstával do 12 m (39 ft) od přistávacího modulu. Shromáždilo 550 snímků, provedlo 16 analýz pomocí APXS - devět hornin a zbytek půdy - a ve spolupráci s landerem provedlo 11 experimentů s oděrem kola a 14 experimentů s mechanikou půdy.
Přistávací místo
Místo přistání roveru bylo vybráno v dubnu 1994 na Lunárním a planetárním institutu v Houstonu. Místo přistání je starodávná záplavová planina zvaná Ares Vallis , která se nachází na severní polokouli Marsu a je jednou z nejskalnějších částí Marsu. Byl vybrán, protože se předpokládalo, že je to relativně bezpečný povrch, na kterém lze přistát, a povrch, který obsahuje širokou škálu hornin, které byly uloženy během povodně. Tato oblast byla dobře známá, protože byla vyfotografována vikingskou misí. Po úspěšném přistání byl přistávací modul oficiálně pojmenován „ Pamětní stanice Carla Sagana “ na počest astronoma.
Rozvinutí
Mars Pathfinder přistál 4. července 1997. Okvětní lístky byly rozmístěny o 87 minut později s roverem Sojourner a solárními panely připevněnými uvnitř. Druhý den rover opustil přistávací modul.
Analýza hornin

Skály v místě přistání dostaly jména kreslených postaviček. Mezi nimi byli Pop Tart, Ender, mini-Matterhorn, Wedge, Baker's Bench, Scooby Doo, Yogi, Barnacle Bill, Medvídek Pú, Prasátko, Beránek, Žralok, Zázvor, Souffle, Casper, Moe a Stimpy. Duna se jmenovala Duna mořské panny a pár kopců dostalo název Twin Peaks.
První analýza byla provedena na skále zvané „ Barnacle Bill “ během třetího solu. Složení horniny bylo určeno spektrometrem APXS, jehož kompletní skenování trvalo 10 hodin. Skála „ Yogi “ byla analyzována na 10. sol. Bylo navrženo, že konformace země v blízkosti skály, dokonce i vizuálně na nižší úrovni než okolní povrch, byla odvozena z odpařování povodňové vody.
Oba kameny se ukázaly být andezity ; toto zjištění překvapilo některé vědce, protože andezity jsou tvořeny geologickými procesy, které vyžadují interakci mezi materiály kůry a pláštěm . Nedostatek informací o okolní vysočině znemožnil pochopit všechny důsledky objevu.
Rover byl poté nasměrován na další cíl a 14. solu analyzoval skálu jménem „Scooby-Doo“ a zobrazil skálu „Casper“. Oba byly považovány za konsolidované vklady. Skála zvaná „Moe“ vykazovala známky větrné eroze . Většina analyzovaných hornin vykazovala vysoký obsah křemíku . V oblasti přezdívané „Skalní zahrada“ narazil rover na duny ve tvaru půlměsíce, které jsou podobné dunám na Zemi.
Místo přistání je bohaté na rozmanité horniny, z nichž některé jsou jasně vulkanického původu, například „Yogi“; další jsou konglomeráty , jejichž původ je předmětem několika návrhů. V jedné hypotéze se vytvořily za přítomnosti vody v dávné minulosti Marsu. Na podporu toho by byl detekován vysoký obsah křemíku. To může být také důsledkem sedimentačních procesů; Byly objeveny zaoblené horniny různých velikostí a tvary údolí jsou kompatibilní s prostředím říčního kanálu. Menší, více zaoblené kameny mohly být také generovány během události dopadu na povrch.
Když byly konečné výsledky mise popsány v sérii článků v časopise Science (5. prosince 1997), věřilo se, že skála Yogi má povlak prachu, ale je podobná skále Barnacle Bill. Výpočty naznačily, že obě horniny většinou obsahují ortopyroxen (křemičitan hořečnato-železitý), živce (křemičitany hliníku draselné, sodné a vápenaté) a křemen (oxid křemičitý) s menším množstvím magnetitu , ilmenitu , sulfidu železa a fosforečnanu vápenatého .

Pobytník v populární kultuře

- Ve filmu Rudá planeta z roku 2000 posádka první mise s posádkou na Marsu přežila nouzové přistání svého vstupního vozidla. Jejich komunikační zařízení je zničeno, takže nemohou kontaktovat své záchranné vozidlo na oběžné dráze. Aby posádka obnovila kontakt, než bude považována za mrtvou a zanechanou na Marsu, vydá se na místo roveru Pathfinder , ze kterého zachrání části, aby vytvořily základní rádio.
- V úvodních titulů v roce 2005 Star Trek: Enterprise , Sojourner je znázorněno spící a pokrytý prachem. Další scéna ukazuje plaketu označující místo přistání roveru na palubě pamětní stanice Carla Sagana . V epizodě „ Terra Prime “ je Sojourner krátce viděn na povrchu Marsu jako památník.
- V románu Andyho Weira z roku 2011 Marťan a filmu z roku 2015 podle něj protagonista Mark Watney uvízl na Marsu. Mark obnoví přistávací modul Pathfinder a použije jej ke kontaktu se Zemí. Pro film byly přistávací modul a rover znovu vytvořeny pomocí JPL. Produkční designér Arthur Max, který na filmu pracoval, řekl, že „mají plně praktický funkční Pathfinder , který používáme v celém filmu“. Ve filmu je Mark Watney později viděn na své základně na Marsu , Ares III Hab, s poletujícím Sojournerem .
Ceny a vyznamenání
- 21. října 1997 v Americké geologické společnosti ‚s výroční zasedání v Salt Lake City, Utah , Sojourner bylo uděleno čestné členství v planetární geologie divize společnosti.
- V listopadu 1997 byla na památku úspěchů programu Mars Pathfinder vydána známka Priority Mail v hodnotě 3 $ . Bylo vytištěno patnáct milionů známek. Razítko je založeno na prvním snímku získaném z Mars Pathfinder po jeho přistání na marťanském povrchu 4. července 1997, který ukazuje rover Sojourner spočívající na Pathfinderu s panoramatickým výhledem na oblast Ares Vallis v pozadí. Reverz razítka nese text o misi Pathfinder.
- Sojourner byl zařazen do Robot Hall of Fame od Carnegie Mellon University .
- Vytrvalostní rover, který přistál v roce 2021, má zjednodušenou reprezentaci všech předchozích marťanských roverů NASA, počínaje Sojournerem , na jedné ze svých vnějších desek.
Klíčová osoba
Vývoj roveru a jeho nástrojů, jakož i jeho vedení během operací na Marsu, provedla skupina inženýrů z NASA, souhrnně označovaných jako „The Rover Team“. Klíčovými zaměstnanci byli:
- Microrover Flight Experiment Manager: Jacob Matijevic , JPL
- Hlavní inženýr, Microrover Flight Experiment: William Layman, JPL
- Montážní a vedoucí testovací inženýr, Microrover Flight Experiment, Allen Sirota, JPL
- Operátor operací mise Microrover: Andrew Mishkin , JPL
- Hlavní řešitel IMP: Peter H. Smith, University of Arizona
- Vedoucí týmu vědy o nástrojích nástroje ASI/MET: John T. Schofield, JPL
- Hlavní inženýr ASI/MET: Clayton LaBaw, JPL
- APXS Hlavní řešitel: Rudolf Rieder, Max-Planck Institute , Department of Chemistry, Mainz, Germany
- Eperiment oděru kol, hlavní řešitelé: D. Ferguson a J. Kolecki, NASA Lewis Research Center
- Experiment adherence materiálu, hlavní řešitelé: G. Landis a P. Jenkins, NASA Lewis Research Center
- Manager of the Mars Exploration Program ve společnosti JPL: Donna Shirley
Galerie

Sojourner ve výrobní fázi.

Pathfinder a Sojourner na JPL v říjnu 1996, byli „složeni“ do své startovací polohy.

Mars Pathfinder se načítá do rakety.



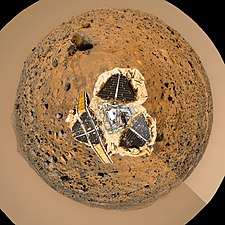
Sol 2 „pojišťovací panorama“ Sojourner , pořízený na filtrech 530, 600 a 750 nm.
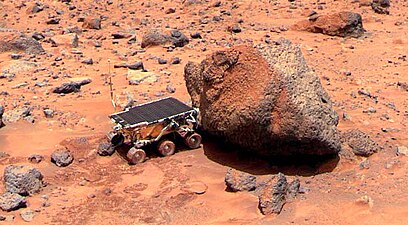
Sojourner provádí spektrometrická měření na skále "Yogi".

Trasa roveru promítaná na snímek pořízený přistávačem.
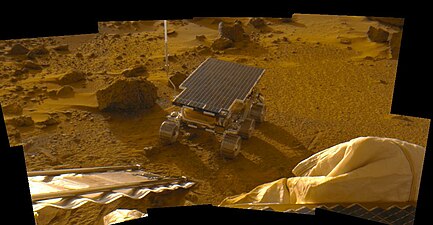
Mozaika přistávacího a roveru shora, barva byla vylepšena, aby se zlepšil kontrast ve funkcích, a je odvozena ze spektrálních filtrů IMP 5, 9 a 0.

Rover poblíž Yogi, sol 10.







Srovnání s pozdějšími rovery Marsu




Příchozí ' s umístění v kontextu

Viz také
- Průzkum Marsu
- Viking 1 (přistávací modul)
- Viking 2 (přistávací modul)
- Duch (rover)
- Příležitost (rover)
- Zvědavost (rover)
- Vytrvalost (rover)
- Zhurong (rover)
- Rosalind Franklin (rover) (plánovaná mise)
Poznámky pod čarou
Reference
Některé části tohoto článku byly původně přeloženy z italského článku Wikipedie. Originál najdete na : Sojourner .
Další čtení
- Andrew Mishkin (2004). Berkeley Books (ed.). Sojourner: Pohled zasvěcených na misi Mars Pathfinder . ISBN 978-0-425-19839-1.
- Tým Rover (1997). „Pathfinder Microrover“. J. Geophys. Res . 102 (E2): 3989–4001. Bibcode : 1997JGR ... 102,3989M . doi : 10,1029/96JE01922 .
externí odkazy
- JPL, NASA (ed.). „Rover Sojourner“ . Mise Mars Pathfinder . Citováno 24. září 2010 .
- JPL, NASA (ed.). „Mars Jak je vidět očima Sojourner Rover“ . Mise Mars Pathfinder . Citováno 24. září 2010 .
- Oficiální webové stránky
- Adresář obrázků Pathfinder
- Deník operací Rover
- Jak začal věk roverů Marsu Lauren J. Young v pátek Science
- Mars Pathfinder Media Reel od JPL na YouTube