
Powered exoskeleton - Powered exoskeleton

Poháněný vnější kostra (také známé jako elektrické výzbroji , hnaných obrněných , napájeného obleku , kybernetický obleku , kybernetický brnění , exosuit , hardsuit , exoframe nebo rozšířený mobility ) je nošení mobilní stroj , který je poháněn soustavou elektrických motorů , pneumatických , páky , hydraulika , nebo kombinace technologií, které umožňují pohyb končetin se zvýšenou silou a vytrvalostí. Jeho design si klade za cíl poskytnout oporu zad, vnímat pohyb uživatele a vysílat signál do motorů, které řídí převody. Exoskeleton podporuje rameno, pas a stehno a napomáhá pohybu při zvedání a držení těžkých předmětů a zároveň snižuje napětí v zádech.
Exoskelet s pohonem se liší od pasivního exoskeletu díky tomu, že pasivní exoskelet není poháněn systémem elektromotorů , pneumatik , pák , hydrauliky nebo kombinací technologií. Nicméně, podobně jako exoskeleton s pohonem, poskytuje uživateli mechanické výhody. To také vysvětluje rozdíl v ortotice . Ortéza by měly podporovat činnost svalovou práci a v nejlepším případě získat ji.
Dějiny
Nejdříve známým zařízením podobným exoskeletu bylo zařízení na podporu pohybu vyvinuté v roce 1890 ruským inženýrem Nicholasem Yaginem. Na pomoc při pohybu využívala energii uloženou ve vaku na stlačený plyn, přestože byla pasivní a vyžadovala lidskou sílu. V roce 1917 americký vynálezce Leslie C. Kelley vyvinul to, co nazval pedomotor, který fungoval na parní energii s umělými vazy působícími souběžně s pohyby nositele. Tento systém dokázal doplnit lidskou sílu o vnější energii.
V 60. letech se začaly objevovat první skutečné „mobilní stroje“ integrované s lidskými pohyby. Oblek s názvem Hardiman byl vyvinut společně společností General Electric a americkými ozbrojenými silami . Oblek byl poháněn hydraulikou a elektřinou a zesílil sílu nositele o faktor 25, takže zvednout 110 kilogramů (240 liber) by znamenalo zvednout 4,5 kilogramu (10 liber). Funkce zvaná zpětná vazba síly umožnila nositeli cítit síly a předměty, se kterými se manipuluje.
Hardiman měl zásadní omezení, včetně hmotnosti 680 kilogramů (1 500 liber). Byl také navržen jako systém master-slave: operátor byl v mistrovském obleku obklopeném vnějším otrockým oblekem, který vykonával práci v reakci na pohyby operátora. Doba odezvy pro otrokářský oblek byla ve srovnání s oblekem vyrobeným z jedné vrstvy pomalá a chyby způsobovaly „násilný a nekontrolovatelný pohyb stroje“ při současném pohybu oběma nohami. Hardimanova pomalá rychlost chůze 0,76 metru za sekundu (2,5 ft/s nebo těsně pod 2 mph) dále omezovala praktické využití a projekt nebyl úspěšný.
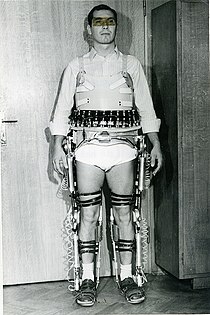
Přibližně ve stejnou dobu byly v institutu Mihajla Pupina v Jugoslávii vyvinuty rané aktivní exoskeletony a humanoidní roboti týmem vedeným prof. Miomirem Vukobratovićem . Nejprve byly vyvinuty pohybové systémy s nohama s cílem pomoci při rehabilitaci paraplegiků. V průběhu vývoje aktivních exoskeletů institut také vyvinul teorii na pomoc při analýze a kontrole lidské chůze. Část této práce informovala o vývoji moderních vysoce výkonných humanoidních robotů. V roce 1972 byl na ortopedické klinice v Bělehradě testován aktivní exoskelet pro rehabilitaci paraplegiků, který byl poháněn pneumaticky a elektronicky programován.
V roce 1985 navrhl inženýr v Los Alamos National Laboratory (LANL) exoskeleton nazvaný Pitman, poháněný brnění pro pěšáky. Návrh zahrnoval senzory skenování mozku v helmě a byl považován za příliš futuristický; nikdy nebyl postaven.
V roce 1986 navrhl exoskeleton nazvaný Lifesuit Monty Reed, americký armádní strážce, který si zlomil záda při nehodě s padákem. Zatímco se zotavoval v nemocnici, přečetl si sci -fi román Roberta Heinleina Starship Troopers a Heinleinův popis silových obleků mobilní pěchoty inspiroval Reeda k návrhu podpůrného exoskeletu. V roce 2001 Reed začal na projektu pracovat na plný úvazek a v roce 2005 měl na sobě 12. prototyp v závodě nohou v Dash Saint Patrick's Day v Seattlu ve Washingtonu. Reed tvrdí, že vytvořil rychlostní rekord v chůzi v robotických oblecích tím, že dokončil závod na 4,8 kilometru (3 mi) průměrnou rychlostí 4 kilometry za hodinu (2,5 mph). Lifesuit prototyp 14 dokáže ujít 1,6 km (1 mi) na plné nabití a zvednout nositele 92 kg (203 lb).
- Některé modely exoskeleton



.jpg)
.jpg)
Klasifikace

Obecná kategorizace naznačuje několik proveditelných kategorií exoskeletů. Tyto kategorie mají obecné třídy, vzhledem k velkému množství exoskeletonů, které existují, a jsou to struktura, část těla, na kterou se zaměřuje, akce, energetická technologie, účel a oblast použití, které se liší jeden od druhého.
Exoskeletony nejsou určeny pouze pro konkrétní části těla; exoskeletony mohou být navrženy obecněji pouze pro jednu ruku, nohu nebo dokonce celé tělo. Oddělení tříd tedy ukazuje, na jaké nejběžnější části těla lze exoskeletony stavět. Třída celého těla se týká exoskeletů vyrobených na pomoc všem končetinám nebo většině těla. Horní část těla se vztahuje na exoskeletony vyrobené pro horní končetiny a zahrnující hrudník, hlavu, záda a/nebo ramena. Kategorie dolní části těla se vztahuje na exoskeletony vyrobené pro dolní končetiny: stehna, dolní končetiny a/nebo boky. Kromě toho existují třídy pro konkrétní končetiny a specifické klouby. Tyto třídy zahrnují exoskeletony určené pro kolena, kotníky, ruce, paže, nohy atd. Kromě toho existuje speciální třída pro jakýkoli jiný exoskelet, který není zahrnut v předchozích třídách.
Tuhé exoskeletony jsou ty, jejichž konstrukční součásti připevněné k tělu uživatele jsou vyrobeny z tvrdých materiálů. Mezi takové materiály patří kovy, plasty, vlákna atd. Na druhé straně měkké exoskeletony, nazývané také exo-obleky, jsou vyráběny z materiálů, které umožňují volný pohyb strukturálních komponent. Exo-obleky se často vyrábějí z textilií, aniž by na ně byly omezeny.
Kategorie akce popisuje typ pomoci, kterou exoskeleton poskytuje uživateli, rozděluje exoskeletony na aktivní a pasivní akci. Aktivní třída zahrnuje exoskeletony, které poskytují uživateli „aktivní“ pomoc; jinými slovy, tyto exoskeletony provádějí pohyby, aniž by uživatel musel aplikovat energii. Energii potřebnou k provedení pohybu dodává externí zdroj. Na druhé straně pasivní třída zahrnuje exoskeletony, které potřebují, aby uživatel provedl pohyb, aby fungoval; tyto exoskeletony nemají zdroje energie. Uživatel tedy musí provést pohyb, a přitom to exoskeleton usnadňuje.
Technologie poháněné pohonem jsou rozděleny do čtyř hlavních tříd, z nichž jedna je specifická pro hybridní a jedna pro jakoukoli jinou běžnou energetickou technologii. Čtyři hlavní třídy zahrnují elektrické, hydraulické a pneumatické ovladače jako aktivní činnost a mechanické systémy jako pasivní činnost.
Účel exoskeletu definuje, k čemu bude exoskeleton použit. Tato kategorie má pouze dvě třídy: zotavení a výkon. Zotavovací exoskeletony se používají k rehabilitaci; výkonnostní exoskeletony slouží k asistenci.
Poslední kategorie zahrnuje aplikační oblast, pro kterou byl exoskeleton vyroben. Každý exoskelet může patřit do jedné nebo více tříd. Vojenská třída zahrnuje jakýkoli exoskelet používaný k jakékoli činnosti zahrnující armádu, námořnictvo, letectvo nebo jakoukoli jinou vojenskou větev. Lékařská třída zahrnuje exoskeletony zapojené do klinických aktivit nebo obecně používané v jakékoli nemocnici/klinice. Exoskeletony pro zotavení jsou navíc obvykle zařazeny do lékařské třídy. Výzkumná třída dále zahrnuje exoskeletony, které jsou v současné době ve fázi vývoje výzkumu. Průmyslová třída, jak naznačuje její název, zahrnuje exoskeletony vyrobené speciálně pro průmyslové činnosti. Tyto exoskeletony jsou charakterizovány tím, že je používají lidé bez jakékoli patologie usilující o zamezení dlouhodobého fyzického poškození. Tento popis platí také pro vojenské exoskeletony. Civilní třída slouží k zotavení nebo výkonu exoskeletonů vyrobených pro lidi v jejich domovech nebo na veřejných prostranstvích, pomáhá při úkolech, které lidé nemohou sami tak snadno vykonávat. Nakonec existuje třída pro exoskeletony, ve které se aplikace nehodí do žádné z předchozích tříd.

Aplikace

Lékařský
V lékařské aplikaci, např. S úplnou paraplegií po poranění míchy , může být exoskelet další možností pro dodávku pomůcek, pokud jsou strukturální a funkční vlastnosti neuromuskulárního a kosterního systému příliš omezené na to, aby bylo možné dosáhnout mobilizace ortézou . U pacientů s úplnou paraplegií (ASIA A) jsou exoskeletony zajímavé jako alternativa k ortéze podle tohoto kritéria pro výšky lézí nad hrudním obratlem (T12). U pacientů s neúplným paraplegie (ASIA BD) , protetiky jsou vhodné i pro výšky léze nad T12 s cílem podpořit vlastní aktivitu pacienta do té míry, že se terapeutické mobilizace může být úspěšné. Na rozdíl od ortézy přebírá exoskeleton velkou část aktivní svalové práce. Exoskeletony poháněné motorem navíc mohou zlepšit kvalitu života jedinců, kteří přišli o nohy, tím, že umožní chůzi podporovanou systémem. Exoskeletony - kterým lze říkat „krokové rehabilitační roboty“ - mohou také pomoci při rehabilitaci mrtvice , poranění míchy nebo během stárnutí. Několik prototypových exoskeletů je ve vývoji. Ekso GT, vyrobený společností Ekso Bionics, je první exoskeleton schválený americkým Úřadem pro kontrolu potravin a léčiv (FDA) pro pacienty s mozkovou mrtvicí. Německé výzkumné centrum pro umělé inteligence vyvinula dva obecné účely poháněné exoskeletons, CAPIO a VI-Bot. Používají se především pro teleoperaci. Vyvíjí se také technologie Exoskeleton, která má zlepšit přesnost během chirurgického zákroku a pomoci sestrám při přesunu a přepravě těžkých pacientů.
Válečný
Vyvinout celotělový oblek, který odpovídá potřebám vojáků, se ukázal jako náročný. Obrana Advanced Research Projects Agency ( DARPA ) zahájila program bojovník Web v září 2011 a vyvinula a financovala několik prototypů, včetně "měkké" exosuit vyvinuté Harvard University ‚s Wyss Institute . Na počátku roku 2000 financovala DARPA první Sarcos celotělový, poháněný prototyp exoskeletu, který byl ovládán hydraulicky a spotřeboval 6 800 wattů energie. Do roku 2010 to DARPA a Sarcos snížily na více než polovinu na 3 000 wattů, ale stále vyžadovaly, aby byl exoskeleton připojen ke zdroji energie. V současné době je Sarcos Guardian XO napájen lithium -iontovými bateriemi a je použitelný pro vojenské logistické aplikace. V roce 2019 byl projekt exoskeletonu americké armády TALOS pozastaven. Pro použití na bojišti byla vyvinuta řada „zeštíhlených“ exoskeletů, jejichž cílem je snížit únavu a zvýšit produktivitu. Například oblek ONYX společnosti Lockheed Martin má za cíl podpořit vojáky při plnění úkolů, které jsou „náročné na kolena“, jako je například přechod obtížným terénem. Skupina Leie Stirlingové zjistila, že exoskeletony mohou zkrátit dobu odezvy vojáka.
Civilní
Exoskeletony jsou vyvíjeny, aby pomohly hasičům a dalším záchranářům stoupat po schodech s těžkou technikou.
Průmysl
V automobilovém průmyslu se stále více využívá technologie pasivního exoskeletu, jejímž cílem je omezit úraz pracovníků (zejména v oblasti ramen a páteře) a omezit chyby způsobené únavou. Jsou také zkoumány pro použití v logistice .
Tyto systémy lze rozdělit do dvou kategorií:
- exoskeletony pro horní končetiny pro asistenci pohybů flexe-extenze ramene;
- exoskeletony pro bederní oporu pro pomoc při ručním zvedání.
Pro nejširší použití musí být průmyslové exoskeletony lehké, pohodlné, bezpečné a minimálně narušující životní prostředí. Pro některé aplikace jsou jednokloubové exoskeletony (tj. Určené k pomoci pouze končetině zapojené do konkrétních úkolů) vhodnější než celotělové obleky. Exoskeletony poháněné celým tělem byly vyvinuty pro pomoc s těžkými náklady v průmyslovém prostředí a pro specializované aplikace, jako je údržba jaderných elektráren.
Biomechanická účinnost exoskeletů v průmyslových aplikacích je však stále do značné míry neznámá. Společnosti musí provést posouzení rizik na pracovištích, na nichž se mají používat exoskeletony. Institut pro bezpečnost a ochranu zdraví německého sociálního úrazového pojištění vyvinula návrh posouzení rizika pro exoskeletů a jejich použití. Posouzení bezpečnosti je založeno na různých zkušenostech včetně bezpečnosti strojů, osobních ochranných prostředků a analýzy rizik fyzického namáhání při práci. Exoskelety dostupné na trhu často nevěnují dostatečnou pozornost bezpečnostním aspektům, v některých případech navzdory tvrzením jejich výrobců o opaku.
produkty
Napájení
- Japet Exoskeleton je výkonný spodní exoskelet pro práci a průmysl založený na zavedených pasivních rovnátkách. Jeho cílem je obnovit kapacity spolupracovníků, protože odkládá únavu, zmírňuje bolest a sleduje pohyby uživatele.
- Indego Exoskeleton společnosti Parker Hannifin je elektricky napájený podpůrný systém nohou schválený FDA, který pomáhá pacientům s poraněním míchy a pacientům s mozkovou mrtvicí chodit.
- ReWalk nabízí poháněný pohyb kyčlí a kolen, který umožňuje osobám s postižením dolních končetin, včetně paraplegie v důsledku poranění míchy (SCI), provádět samostatně stojící, chůzi a schodiště stoupající a klesající. ReStore, jednodušší systém stejného výrobce, se připevňuje k jedné noze a pomáhá s rekvalifikací chůze a byl schválen FDA v roce 2019.
- EskoGT společnosti Ekso Bionics je hydraulicky poháněný exoskeletonový systém, který umožňuje paraplegikům stát a chodit s berlemi nebo chodítkem. Byl schválen FDA v roce 2019.
- SuitX's Phoenix je modulární, lehký a levný exoskeleton, poháněný bateriovým batohem, který umožňuje paraplegikům chodit rychlostí až 1,8 kilometru za hodinu (1,1 mph).
- Cyberdyne's HAL je nositelný robot, který je dodáván v několika konfiguracích. HAL se v současné době používá v japonských a amerických nemocnicích a v roce 2013 získal globální certifikaci bezpečnosti.
- Asistenční zařízení pro chůzi Honda je částečný exoskeleton, který pomáhá těm, kteří mají potíže s chůzí bez podpory. V roce 2019 to bylo oznámeno FDA před uvedením na trh.
- Evropská kosmická agentura vyvinula celou řadu ergonomických exoskeletů pro robotické teleoperation včetně EXARM, X-Arm-2 a SAM exoskeletons. Cílovou aplikací je telemanipulace robotů podobných astronautům, pracujících ve vzdáleném drsném prostředí.
- V roce 2018 byl španělský poskytovatel exoskeletu Gogoa Mobility první evropskou společností, která získala schválení CE pro svůj poháněný exoskelet spodní části těla HANK pro lékařské použití. Schválení CE pokrývalo použití HANK k rehabilitaci v důsledku poranění míchy (SCI), Acquired Brain Damage (ABD) a neurodegenerativních nemocí. V únoru 2020 získal jejich CE exoskeleton nazvaný Belk také schválení CE.
- Roam Robotics vyrábí měkký exoskelet pro lyžaře a snowboardisty.
- Wandercraft produkuje Atalante, první napájený exoskeleton, který uživatelům umožňuje chodit bez použití rukou, na rozdíl od většiny lékařských exoskeletonů, které vyžadují současné používání berlí.
- Sarcos představil celotělový, poháněný exoskeleton, Guardian XO, který může zvednout až 200 liber (91 kg). Jejich verze „Alpha“ byla předvedena na 2020 Consumer Electronics Show s Delta Air Lines .
Projekty pozastaveny/opuštěny
- Lidský univerzální nosič nákladu (HULC) společnosti Lockheed Martin byl opuštěn poté, co testy ukázaly, že nošení obleku způsobilo, že uživatelé během kontrolovaných procházek na běžícím pásu vynaložili výrazně více energie.
- Berkeley dolní končetiny Exoskeleton (BLEEX) se skládala z mechanických výztuh kovových nohou, napájecí jednotky a batoh-jako rám nést těžký náklad. Technologie vyvinutá pro BLEEX vedla k SuitX Phoenix.
- V roce 2013 byl uveden projekt z univerzity v Gentu , WALL-X, aby snížil metabolické náklady na běžnou chůzi. Tohoto výsledku bylo dosaženo optimalizací kontrol na základě studia biomechaniky interakce člověk-exoskelet.
Omezení a problémy s designem
Mobilní pomůcky jsou často opouštěny kvůli nedostatečné použitelnosti. Mezi hlavní měřítka použitelnosti patří to, zda zařízení snižuje spotřebu energie během pohybu a zda je bezpečné jej používat. Níže jsou uvedeny některé konstrukční problémy, se kterými se inženýři potýkají.
Zdroj napájení
Jedním z největších problémů, se kterými se inženýři a designéři exoskeletonů potýkají, je napájení . Toto je zvláštní problém, pokud je exoskeleton určen k nošení „na poli“, tj. Mimo kontext, ve kterém může být exoskeleton připoután ke zdroji energie. Baterie vyžadují častou výměnu nebo dobíjení a hrozí nebezpečí výbuchu v důsledku tepelného úniku. Podle společnosti Sarcos společnost vyřešila některé z těchto problémů souvisejících s technologií baterií, zejména spotřebu, snížení množství energie potřebné k provozu Guardian XO na méně než 500 wattů a umožnění „výměny baterií“ za provozu bez vypnutí jednotka. Zdroje spalovacího motoru nabízejí vysoký energetický výkon, ale mezi problémy patří výfukové plyny, teplo a neschopnost plynule modulovat výkon. U některých prototypů byly použity vodíkové články, ale také trpí několika problémy.
Kostra
Rané exoskeletony používaly levné a snadno tvarovatelné materiály, jako je ocel a hliník. Ocel je však těžká a poháněný exoskeleton musí pracovat tvrději, aby překonal vlastní hmotnost a snížil účinnost. Slitiny hliníku jsou lehké, ale rychle propadají únavě. Sklolaminát, uhlíková vlákna a uhlíkové nanotrubičky mají podstatně vyšší pevnost na hmotnost. „Měkké“ exoskeletony, které připevňují motory a ovládací zařízení k flexibilnímu oblečení, jsou také ve vývoji.
Pohony

Společné pohony také čelí výzvě být lehké, a přitom výkonné. Mezi používané technologie patří pneumatické aktivátory, hydraulické válce a elektronické servomotory . Vyšetřují se elastické ovladače, aby simulovaly kontrolu tuhosti v lidských končetinách a poskytovaly vnímání dotyku. Vzduchu sval , také znám jako pletené pneumatický pohon nebo McKibben vzduch svalů, se také používá pro zvýšení hmatovou zpětnou vazbu.
Flexibilita kloubů
Flexibilita lidské anatomie je konstrukčním problémem tradičních „tvrdých“ robotů. Několik lidských kloubů, jako jsou boky a ramena, jsou kulové a zásuvkové klouby se středem otáčení uvnitř těla. Protože žádní dva jedinci nejsou úplně stejní, není možné plně napodobovat stupně volnosti kloubu. Místo toho je exoskeletový kloub běžně modelován jako řada závěsů s jedním stupněm volnosti pro každou z dominantních rotací.
Pružnost páteře je další výzvou, protože páteř je ve skutečnosti hromádkou kulových kloubů s omezeným pohybem. Neexistuje jednoduchá kombinace vnějších jednoosých závěsů, které by se snadno shodovaly s celým rozsahem pohybu lidské páteře. Protože přesné zarovnání je náročné, zařízení často obsahují schopnost kompenzovat nesouosost s dalšími stupni volnosti.
Měkké exoskeletony se ohýbají s tělem a řeší některé z těchto problémů.
Řízení výkonu a modulace
Úspěšný exoskeleton by měl svému uživateli pomoci, například snížením energie potřebné k provedení úkolu. Jednotlivé odchylky v povaze, rozsahu a síle pohybů znesnadňují standardizovanému zařízení poskytnout odpovídající množství pomoci ve správný čas. Algoritmy pro vyladění řídicích parametrů pro automatickou optimalizaci nákladů na energii při chůzi jsou ve vývoji. Přímá zpětná vazba mezi lidským nervovým systémem a motorizovanou protetikou („neuro-ztělesněný design“) byla také implementována v několika vysoce profilovaných případech.
Přizpůsobení variacím velikosti uživatele
Lidé vykazují širokou škálu rozdílů ve fyzické velikosti jak v délkách kosterních kostí, tak v obvodu končetin a trupu, takže exoskeletony musí být buď přizpůsobitelné, nebo přizpůsobené jednotlivým uživatelům. Ve vojenských aplikacích to může být možné vyřešit požadavkem, aby uživatel měl schválenou fyzickou velikost, aby mu mohl být vydán exoskelet. Omezení velikosti fyzického těla se již v armádě vyskytuje u zaměstnání, jako jsou piloti letadel, kvůli problémům s montáží sedadel a ovládacích prvků pro velmi velké a velmi malé lidi. U měkkých exoskeletonů je to menší problém.
Zdraví a bezpečnost
Zatímco exoskeletony mohou snížit stres z manuální práce, mohou také představovat nebezpečí. Americká centra pro kontrolu a prevenci nemocí (CDC) vyzvala k výzkumu zaměřenému na potenciální nebezpečí a přínosy této technologie, přičemž si všimla potenciálních nových rizikových faktorů pro pracovníky, jako je například nedostatečná mobilita, aby se vyhnuli pádu předmětu, a potenciální pády způsobené posun těžiště.
V roce 2018 americký úřad pro bezpečnost a ochranu zdraví nepřipravoval žádné bezpečnostní standardy pro exoskeletony. Mezinárodní organizace pro normalizaci zveřejnila bezpečnostní standard v roce 2014 a ASTM International pracuje na standardech, které mají být propuštěn od roku 2019.
Hlavní události
- Cybathlon -mezinárodní soutěž, ve které proti sobě soutěží lidé s tělesným postižením při plnění každodenních úkolů pomocí nejmodernějších systémů technické pomoci.
Fiktivní vyobrazení
Poháněné exoskeletony se objevují v knihách sci -fi a médiích jako standardní vybavení vesmírných mariňáků , horníků, astronautů a kolonistů. Jako příklady lze uvést Tony Stark je Iron Man oblek, robot exoskeleton používaný Ellen Ripley v boji proti Xenomorph královnu v Cizinci a Power Armor používán v Fallout videohry povolení.
Viz také
- Ortéza zad : poněkud podobná zařízení jako pasivní exoskeletony
- Bionika
- Future Force Warrior
- Seznam nově vznikajících technologií
- Mecha
- Pěší kamion , známý také jako „kybernetický antropomorfní stroj“
Reference
externí odkazy
- Video, obrázky a články o projektu exoskeletonu Bleex
- Kalifornská univerzita v Los Angeles (UCLA) - projekt Exo Arm
- Wired Issue 13.01, leden 2005- Ironmen , první soutěž ve vzpírání exoskeletonů na světě
- Video a abstrakt o robotické ortéze GAIT (přes IEEE Xplore)
- Vojenský humanoidní exoskelet SARCOS (YouTube)