
Parametrická rovnice -Parametric equation
V matematice parametrická rovnice definuje skupinu veličin jako funkce jedné nebo více nezávislých proměnných nazývaných parametry . Parametrické rovnice se běžně používají k vyjádření souřadnic bodů, které tvoří geometrický objekt, jako je křivka nebo plocha , v takovém případě se rovnice souhrnně nazývají parametrická reprezentace nebo parametrizace (alternativně hláskovaná jako parametrizace ) objektu.
Například rovnice

tvoří parametrickou reprezentaci jednotkové kružnice , kde t je parametr: Bod ( x , y ) je na jednotkové kružnici právě tehdy, když existuje hodnota t taková, že tyto dvě rovnice generují tento bod. Někdy jsou parametrické rovnice pro jednotlivé skalární výstupní proměnné kombinovány do jediné parametrické rovnice ve vektorech :

Parametrické reprezentace jsou obecně nejedinečné (viz část "Příklady ve dvou rozměrech" níže), takže stejné veličiny mohou být vyjádřeny řadou různých parametrizací.
Kromě křivek a ploch mohou parametrické rovnice popisovat variety a algebraické variety vyšších rozměrů , přičemž počet parametrů je roven rozměru variety nebo variety a počet rovnic je roven rozměru prostoru, ve kterém uvažuje se varieta nebo varieta (pro křivky je rozměr jeden a používá se jeden parametr, pro plochy rozměr dva a dva parametry atd.).
Parametrické rovnice se běžně používají v kinematice , kde trajektorie objektu je reprezentována rovnicemi v závislosti na čase jako parametru. Kvůli této aplikaci je jeden parametr často označen t ; parametry však mohou představovat jiné fyzikální veličiny (jako jsou geometrické proměnné) nebo je lze pro pohodlí zvolit libovolně. Parametrizace nejsou jedinečné; více než jedna sada parametrických rovnic může specifikovat stejnou křivku.
Aplikace
Kinematika
V kinematice jsou cesty objektů prostorem běžně popisovány jako parametrické křivky, přičemž každá prostorová souřadnice závisí výslovně na nezávislém parametru (obvykle čase). Takto použitá sada parametrických rovnic pro souřadnice objektu společně tvoří vektorově ohodnocenou funkci pro polohu. Takové parametrické křivky pak mohou být integrovány a termicky diferencovány . Pokud je tedy poloha částice popsána parametricky jako

pak jeho rychlost lze nalézt jako

a jeho zrychlení jako
- .

Počítačem podporovaný design
Další důležité využití parametrických rovnic je v oblasti počítačově podporovaného navrhování (CAD). Zvažte například následující tři reprezentace, z nichž všechny se běžně používají k popisu rovinných křivek .
| Typ | Formulář | Příklad | Popis |
|---|---|---|---|
| Explicitní | Čára | ||
| Implicitní | Kruh | ||
| Parametrické | Čára | ||
| Kruh |










Každá reprezentace má výhody a nevýhody pro CAD aplikace.
Explicitní reprezentace může být velmi komplikovaná nebo dokonce nemusí existovat. Navíc se nechová dobře při geometrických transformacích a zejména při rotacích . Na druhou stranu, protože parametrickou rovnici a implicitní rovnici lze snadno odvodit z explicitní reprezentace, když jednoduchá explicitní reprezentace existuje, má výhody obou ostatních reprezentací.
Implicitní reprezentace mohou ztížit generování bodů na křivce a dokonce i rozhodování, zda existují skutečné body. Na druhou stranu se dobře hodí pro rozhodování, zda je daný bod na křivce, nebo zda je uvnitř či vně uzavřené křivky.
Taková rozhodnutí mohou být u parametrické reprezentace obtížná, ale parametrická reprezentace se nejlépe hodí pro generování bodů na křivce a pro její vykreslování.
Celočíselná geometrie
Pomocí parametrických rovnic lze řešit řadu problémů v celočíselné geometrii . Klasickým takovým řešením je Euklidova parametrizace pravoúhlých trojúhelníků taková, že délky jejich stran a , b a jejich přepony c jsou spolu prvočísla . Protože a a b nejsou obě sudé (jinak by a , b a c nebyly coprime), lze je vyměnit za sudé a parametrizace je pak

kde parametry m a n jsou kladná koprimá celá čísla, která nejsou obě lichá.
Vynásobením a , b a c libovolným kladným celým číslem dostaneme parametrizaci všech pravoúhlých trojúhelníků, jejichž tři strany mají celočíselnou délku.
Implicitizace
Převod sady parametrických rovnic na jedinou implicitní rovnici zahrnuje odstranění proměnné ze simultánních rovnic . Tento proces se nazývá implicitizace . Pokud lze jednu z těchto rovnic vyřešit pro t , získaný výraz lze dosadit do druhé rovnice, aby se získala rovnice zahrnující pouze x a y : Řešení pro získání a použití tohoto v dává explicitní rovnici , zatímco složitější případy poskytnou implicitní rovnice tvaru







Pokud je parametrizace dána racionálními funkcemi

kde p , q , r jsou množinové koprime polynomy, výsledný výpočet umožňuje implicitní. Přesněji řečeno, implicitní rovnice je výslednice vzhledem k t xr ( t ) – p ( t ) a yr ( t ) – q ( t )
Ve vyšších dimenzích (buď více než dvě souřadnice nebo více než jeden parametr), implicitizace racionálních parametrických rovnic může být provedena pomocí Gröbnerova základu výpočtu; viz Gröbnerův základ § Implicitizace ve vyšší dimenzi .
Vezměme si příklad kružnice o poloměru a , parametrické rovnice

může být implicitní v termínech x a y prostřednictvím pythagorejské trigonometrické identity :
Tak jako

a

dostaneme

a tudíž

což je standardní rovnice kružnice se středem v počátku.
Příklady ve dvou rozměrech
Parabola
Nejjednodušší rovnice pro parabolu ,

lze (triviálně) parametrizovat pomocí volného parametru t a nastavení

Explicitní rovnice
Obecněji řečeno, jakákoli křivka daná explicitní rovnicí

lze (triviálně) parametrizovat pomocí volného parametru t a nastavení

Kruh
Sofistikovanější příklad je následující. Uvažujme jednotkovou kružnici, která je popsána obyčejnou (kartézskou) rovnicí

Tuto rovnici lze parametrizovat takto:

Pomocí kartézské rovnice je snazší zkontrolovat, zda bod leží na kružnici nebo ne. S parametrickou verzí je snazší získat body na grafu.
V některých kontextech jsou preferovány parametrické rovnice zahrnující pouze racionální funkce (tj. zlomky dvou polynomů ), pokud existují. V případě kruhu taková racionální parametrizace je

U této dvojice parametrických rovnic není bod (−1, 0) reprezentován reálnou hodnotou t , ale limitou x a y , když t směřuje k nekonečnu .
Elipsa
Elipsa v kanonické poloze (střed v počátku, hlavní osa podél osy X ) s poloosami a a b může být reprezentována parametricky jako

Elipsu v obecné poloze lze vyjádřit jako

protože parametr t se mění od 0 do 2 π . Zde je střed elipsy a úhel mezi osou - a hlavní osou elipsy.



Obě parametrizace mohou být racionální pomocí vzorce a nastavení tečného polovičního úhlu

Lissajousova křivka



Lissajousova křivka je podobná elipse, ale sinusoidy x a y nejsou ve fázi. V kanonické poloze je Lissajousova křivka dána pomocí

kde a jsou konstanty popisující počet laloků obrázku.


Hyperbola
Východozápadní otevírací hyperbolu lze parametricky reprezentovat pomocí
- nebo racionálně


Hyperbola otevírání sever-jih může být reprezentována parametricky jako
- nebo racionálně


Ve všech těchto vzorcích ( h , k ) jsou středové souřadnice hyperboly, a je délka hlavní poloosy a b je délka vedlejší poloosy.
Hypotrochoidní
Hypotrochoid je křivka vyznačená bodem připojeným ke kružnici o poloměru r , která se valí kolem vnitřku pevné kružnice o poloměru R , kde bod je ve vzdálenosti d od středu vnitřní kružnice.
 Hypotrochoid, pro kterou r = d
Hypotrochoid, pro kterou r = d Hypotrochoid, pro který R = 5, r = 3, d = 5
Hypotrochoid, pro který R = 5, r = 3, d = 5


Parametrické rovnice pro hypotrochoidy jsou:

Některé sofistikované funkce
Jsou uvedeny další příklady:
![{\displaystyle {\begin{aligned}x&=[ab]\cos(t)\ +b\cos \left[t\left({\frac {a}{b}}-1\right)\right]\ \y&=[ab]\sin(t)\ -b\sin \left[t\left({\frac {a}{b}}-1\right)\right],\ k={\frac {a }{b}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f4620f83a90c7e5323d21bc2697bcb3aa3dae35)


 j = 3, k = 3
j = 3, k = 3 j = 3, k = 3
j = 3, k = 3 j = 3, k = 4
j = 3, k = 4 j = 3, k = 4
j = 3, k = 4 j = 3, k = 4
j = 3, k = 4






 i = 1, j = 2
i = 1, j = 2

Příklady ve třech rozměrech
Spirála

Parametrické rovnice jsou vhodné pro popis křivek ve vícerozměrných prostorech. Například:

popisuje trojrozměrnou křivku, šroubovici , s poloměrem a a stoupá o 2π b jednotek na otáčku. Rovnice jsou v rovině totožné s rovnicemi pro kruh. Takové výrazy, jako je ten výše, se běžně píší jako

kde r je trojrozměrný vektor.
Parametrické plochy
Anuloid s hlavním poloměrem R a vedlejším poloměrem r lze definovat parametricky jako

kde oba parametry t a u se oba mění mezi 0 a 2π.
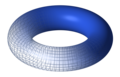
R = 2, r = 1/2

Jak se u mění od 0 do 2π, bod na povrchu se pohybuje po krátké kružnici procházející otvorem v torusu. Jak se t mění od 0 do 2π, bod na povrchu se pohybuje po dlouhém kruhu kolem otvoru v torusu.
Příklady s vektory
Parametrická rovnice přímky procházející bodem a rovnoběžná s vektorem je



Viz také
- Křivka
- Parametrický odhad
- Vektor polohy
- Funkce s vektorovou hodnotou
- Parametrizace podle délky oblouku
- Parametrická derivace
Poznámky
- ^ a b c Weisstein, Eric W. "Parametrické rovnice" . MathWorld .
- ^ Thomas, George B.; Finney, Ross L. (1979). Počet a analytická geometrie (páté vydání). Addison-Wesley . p. 91.
- ^ Nykamp, Duane. "Příklad parametrizace roviny" . mathinsight.org . Staženo 2017-04-14 .
- ^ Spitzbart, Abraham (1975). Počet s analytickou geometrií . Gleview, IL: Scott, Foresman and Company. ISBN 0-673-07907-4. Staženo 30. srpna 2015 .
- ^ Stewart, James (2003). Calculus (5. vyd.). Belmont, CA: Thomson Learning, Inc. str. 687–689 . ISBN 0-534-39339-X.
- ^ Shah, Jami J.; Martti Mantyla (1995). Parametrický CAD/CAM založený na funkcích: koncepty, techniky a aplikace . New York, NY: John Wiley & Sons, Inc. s. 29–31. ISBN 0-471-00214-3.
- ^ Počet: Single and Multivariable . John Wiley. 2012-10-29. p. 919. ISBN 9780470888612. OCLC 828768012 .